一种可径向平衡调整的履带式斜拉索机器人
1.本发明属于机械领域,设计一种斜拉索检测机器人,具体为一种可径向平衡调整的履带式斜拉索机器人。
背景技术:
2.我国的斜拉索桥梁数量目前已位居世界前列,一系列的安全问题也随之迎来,大批斜拉索亟待进行安全维护。当前,对大桥斜拉索的质检工作普遍采用人工的方式,工人佩戴安全绳行走在缆索上对每一根钢索进行检测;而人工检测危险系数大、检测难度高、效率低、劳动强度高,且针对较为隐蔽的缺陷肉眼较难发现;目前市面上的斜拉索检测机器人,体积较为庞大,灵活度不高,工作时稳定性不足,且设备的造价和维护费较高,现场安装调试不方便,不适合在桥梁斜拉索检测过程中使用。申请号:cn202110789742.7公布了一种斜拉索自动检测系统,该装置提高了检测过程中的便捷性和高效性,但是不能实现对不同斜拉索表面的适应,同时不能实行径向平衡控制,且工作效率低下。
技术实现要素:
3.针对上述技术问题,本发明的目的是提供一种可径向平衡调整的履带式斜拉索机器人,通过多种行走模式来沿着斜拉索进行攀爬行走,以提高行走过程中的灵活性和稳定性。
4.为了解决上述技术问题,本发明采用的技术方案如下:
5.一种可径向平衡调整的履带式斜拉索机器人,其特征在于:包括机器人框架、设于机器人框架内的行走模块和设于机器人框架前后两端的径向平衡模块、ai缺陷检测模块,ai缺陷检测模块用于对斜拉索进行视觉检测,所述径向平衡模块用于对行走模块和斜拉索之间进行径向平衡;
6.所述行走模块包括设于机器人框架内的至少三个攀爬机构,所述机器人框架为能打开的多边形框架,每个攀爬机构均包括攀爬支架、曲轴、凸轮、攀爬动力装置、两个浮动支撑板和自带动力的行走履带,两个浮动支撑板通过径向滑动机构浮动安装在攀爬支架上,攀爬支架固定在机器人框架内侧;
7.每个浮动支撑板上设有至少一个能自由转动的攀爬主轴,两个浮动支撑板内侧的攀爬主轴端部均固定连接有曲轴,外侧的攀爬主轴端部均固定连接有凸轮;
8.所述行走履带安装于两个浮动支撑板之间,且通过转动副与曲轴另一端相连,多个行走履带之间构能成与斜拉索接触的攀爬或者行走空间;
9.每个凸轮下方设有一个与之接触的浮动体,所述浮动体通过第一径向弹性装置安装在攀爬支架上,通过第一径向弹性装置为攀爬机构和斜拉索之间提供径向的接触力,所述浮动支撑板内侧设有与斜拉索接触的防滑面,多个攀爬机构的浮动支撑板的防滑面之间构成了能与斜拉索接触的攀爬空间;
10.所述攀爬动力装置用于驱动攀爬主轴进行攀爬,通过选择凸轮和曲轴的相位使
得,攀爬主轴转动过程中,浮动支撑板和行走履带交替挤压在斜拉索上,实现攀爬运动。
11.进一步地,所述攀爬动力装置安装于攀爬支架上,至少一个攀爬主轴通过浮动动力传递机构与攀爬动力装置相连,同一个浮动支撑板上的攀爬主轴之间通过同步带机构相连。
12.进一步地,所述攀爬机构安装于多边形框架的面内,攀爬机构的数量等于多边形框架的变数的一半,比如对于六边形外框架,可以设置3个攀爬机构,对于八边形框架架,可以设置4个攀爬机构,对于十边形外框架,可以设置5个攀爬机构。
13.进一步地,所述径向滑动机构包括固设于攀爬支架上的若干支撑光轴,所述浮动支撑板通过滑动副安装在相应的支撑光轴上,一般来说,每个浮动支撑板至少设置两根支撑光轴。
14.进一步地,所述浮动动力传递机构包括第一传动轴、第一圆锥齿轮组、伸缩主轴、第二转动轴和第二圆锥齿轮组,所述伸缩主轴下端通过第一圆锥齿轮组,所述第一传动轴安装在攀爬支架上,且与攀爬动力装置相连;
15.伸缩主轴的另一端通过第二圆锥齿轮组与第二转动轴相连,第二转动轴安装在浮动支撑板上,且与攀爬主轴动力传动相连,伸缩主轴的伸缩方向与径向滑动机构的滑动方向相同。
16.进一步地,相邻攀爬机构的两个相邻的第一传动轴之间通过万向节装置动力传动相连。
17.进一步地,所述万向节装置包括第一连接轴、第一万向节、万向节中间轴、第二万向节和第二连接轴,所述第一连接轴和第二连接轴分别与两个相邻的第一传动轴相连,所述万向节中间轴分别通过第一万向节、第二万向节与第一连接轴、第二连接轴相连。
18.进一步地,所述浮动体上设有与凸轮紧密贴合的凹面。
19.进一步地,所述第一径向弹性装置包括高弹力弹簧支座、高弹力弹簧和至少一根限位光轴,所述高弹力弹簧支座固定于攀爬支架上,且高弹力弹簧支座设有供所述限位光轴自由滑动的滑孔,所述浮动体固定于所述限位光轴的一端,限位光轴另一端安装在滑孔内,所述高弹力弹簧套设于限位光轴上,且位于浮动体和高弹力弹簧支座之间,通过所述高弹力弹簧使得浮动体远离高弹力弹簧支座紧贴在凸轮上。
20.进一步地,所述径向平衡模块包括全向轮、平衡电机、第二径向弹性装置和截面形状与机器人框架相同的径向平衡支架,所述径向平衡支架固定安装在机器人框架端部,所述全向轮至少有三个,多个全向轮分别通过第二径向弹性装置安装在径向平衡支架上,且在径向平衡支架内周向均匀分布,通过第二径向弹性装置使得全向轮紧密低靠在斜拉索上,每个全向轮均设有一个与之动力相连的平衡电机,平衡电机的轴向与斜拉索轴向平行,所述全向轮上设有若干与斜拉索接触的滚动体,所述滚动体的滚动方向与斜拉索轴向平行。
21.进一步地,所述第二径向弹性装置包括
22.进一步地,所述ai缺陷检测模块包括ai缺陷检测框架和若干ai缺陷检测相机,所述ai缺陷检测框架固定在机器人框架端部,所述ai缺陷检测相机通过相机支架安装在ai缺陷检测框架上。
23.本发明与现有技术相比的有益效果是:
24.1.本发明能实现履带轮式行走、攀爬式行走、动态径向平衡以及斜拉索ai检测一体化作业,极大地提升了工作效率。
25.2.本发明具有两种行走机构,针对不同的斜拉索表面有更好的适应性。
26.3.本发明搭载有径向自动平衡装置,该装置可以为ai相机提供稳定的工作环境,保证了识别效果。
27.4.本发明多处采用了巧妙的机械传动,让机器人操作更加简便。
28.5.在行走时,在行走履带外侧的浮动支撑板处巧妙的设有由凸轮机构和第一径向弹性装置组成的凸轮机构弹力自适应装置,使得攀爬过程中,行走履带和行走履带交替与斜拉索接触,并且接触力保持不变,为攀爬的过程中提供稳定的正压力,能保证机器人安全平稳的工作。
附图说明
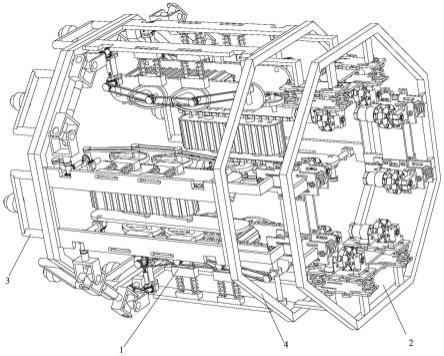
29.图1为发明履带式斜拉索机器人的整体结构示意图。
30.图2为发明的行走模块结构示意图。
31.图3为发明的浮动动力传递机构、攀爬动力装置和径向滑动机构结构示意图。
32.图4为图3中局部放大示意图a。
33.图5为发明的行走履带结构示意图。
34.图6为发明的行走履带去掉高摩擦力履带后示意图。
35.图7为发明的径向平衡模块前侧结构示意图。
36.图8为图7中局部放大示意图b。
37.图9为径向平衡模块后侧局部示意图。
38.图10为发明的ai缺陷检测模块结构示意图。
39.附图标号:1-行走模块;2-径向平衡模块;3-ai缺陷检测模块;101-攀爬支架;102-第一径向弹性装置;103-第一连接轴;104-第一万向节;105-第二万向节;106-第二连接轴;107-万向节中间轴;108-光轴支撑座;109-浮动体;110-限位光轴;111-高弹力弹簧;112-高弹力弹簧支座;113-短半轴伸缩主轴支座;114-短半轴伸缩主轴;115-长半轴伸缩主轴;116-支撑光轴;117-长半轴伸缩主轴支座;118-长半轴伸缩主轴圆锥齿轮;119-第一传动轴同步轮;120-第一传动轴;121-第一传动轴圆锥齿轮;122-第一同步带;123-电机输出轴同步轮;124-电机输出轴;125-行走机构纵向支撑底座;126-行走机构横向支撑底座;127-十字截面滑孔;128-光轴下支撑座;129-行走电机;130-第二传动轴同步轮;131-第二传动轴同步带;132-第二传动轴;133-第二传动轴圆锥齿轮;134-光轴上支撑座;135-支撑光轴上半轴;136-短半轴伸缩主轴圆锥齿轮;137-攀爬主轴同步轮;138-攀爬主轴同步带;139-曲轴支撑圆环;140-凸轮;141-攀爬主轴;142-曲轴;143-履带支撑侧板;144-高摩擦力履带;145-浮动支撑板;146-履带轮内部驱动轮主轴;147-履带轮内部驱动轮齿轮;148-履带轮内部驱动轮;149-履带轮内部半轴;150-履带轮内部半轴齿轮;151-履带轮内部动力传输皮带;152-履带轮内部驱动电机主轴;153-履带轮内部驱动电机;154-履带轮内部驱动电机皮带轮;155-行走履带;156-防滑面;201-径向平衡支架;202-径向平衡模块下底板支撑架;203-螺纹端;204-间隙调整螺母;205-径向平衡模块下底板;206-压力弹簧下底板;207-压力弹簧限位轴;208-压力弹簧;209-压力弹簧上底板;210-径向平衡模块上底板;211-径向
平衡装置光轴支撑座底板;212-径向平衡装置光轴;213-径向平衡装置光轴支撑座;214-光轴座端联轴器;215-全向轮;216-光电编码器;217-减速电机支撑座;218-直流电机;219-电机减速器;220-电机端联轴器;221-滚动体;301-ai缺陷检测框架;302-圆柱形支撑;303-ai相机支撑横梁;304-ai缺陷检测相机,4-机器人框架,41-上半部分,42-下半部分,43-八边形环。
具体实施方式
40.下面结合具体实施例对本发明作进一步描述,在此发明的示意性实施例以及说明用来解释本发明,但并不作为对本发明的限定。下面以正八边形框架为机器人框架4对本发明进行举例说明。
41.如图1至图10所示,本发明提供一种可径向平衡调整的履带式斜拉索机器人,包括机器人框架4、设于机器人框架4内的行走模块1和设于机器人框架4前后两端的径向平衡模块2、ai缺陷检测模块3,ai缺陷检测模块3用于对斜拉索进行视觉检测,所述径向平衡模块2用于对行走模块1和斜拉索之间进行径向平衡;
42.所述行走模块1包括设于机器人框架4内的四个攀爬机构,所述机器人框架4为能开合打开的多边形框架,每个攀爬机构均包括攀爬支架101、曲轴142、凸轮140、攀爬动力装置、两个浮动支撑板145和自带动力的行走履带155,两个浮动支撑板145通过径向滑动机构浮动安装在攀爬支架101上,攀爬支架101固定在机器人框架4内侧;
43.每个浮动支撑板145上设有两个能自由转动的攀爬主轴141,两个浮动支撑板145内侧的攀爬主轴141端部均固定连接有曲轴142,外侧的攀爬主轴141端部均固定连接有凸轮140;
44.所述行走履带155安装于两个浮动支撑板145之间,且通过转动副与曲轴142另一端相连,4个行走履带155之间构能成与斜拉索接触的攀爬或者行走空间;
45.每个凸轮140下方设有一个与之接触的浮动体109,所述浮动体109通过第一径向弹性装置102安装在攀爬支架101上,通过第一径向弹性装置102为攀爬机构和斜拉索之间提供径向的接触力,所述浮动支撑板145内侧设有与斜拉索接触的防滑面156,4个攀爬机构的浮动支撑板145的防滑面156之间构成了能与斜拉索接触的攀爬空间;
46.所述攀爬动力装置用于驱动攀爬主轴141进行攀爬,通过选择凸轮140和曲轴142的相位使得,攀爬主轴141转动过程中,浮动支撑板145和行走履带155交替挤压在斜拉索上,实现攀爬运动。
47.本发明通过机器人框架4的开合进行上线和下线,上线后有两种行走模式,第一种通过履带行走,通过旋转攀爬主轴141,使得行走履带155相对凸出,靠近并压紧在斜拉索上,利用行走履带155内部自带动力进行行走;第二种行走模式为交替行走,停掉行走履带155自身动力,通过攀爬动力装置驱动攀爬主轴141持续转动,攀爬主轴141一边通过曲柄带动行走履带155在径向上运动,另一边通过凸轮140和浮动体109之间接触,改变浮动体109与行走履带155在径向上的相对距离实现行走,具体的,当凸轮140对浮动体109挤压最少时,行走履带155处于相对于浮动支撑板145最突出状态,当凸轮140对浮动体109挤压最多时,行走履带155处于相对于浮动支撑板145最凹进去状态,行走履带155和浮动支撑板145交替压紧斜拉索进行间歇式攀爬。
48.作为一种优选实施例,如图2所示,所述多边形框架为八边形框架,本实施例中包括两个八边形环43,两个八边形环43通过攀爬支架101相连(也可以通过其他连接件相连),形成稳定的八边形外框,每个八边形环43均由下半部分42和上半部分41通过可打开结构相连组成,具体形式不限,可以是螺栓连接,也可以是卡扣连接之类,也可以是以边卡扣,另一边采用合页相连等等。
49.作为一种优选实施例,如图2-图4所示,所述攀爬动力装置安装于攀爬支架101上,至少一个攀爬主轴141通过浮动动力传递机构与攀爬动力装置相连,攀爬主轴141之间通过同步带机构相连。本实施例中,所述攀爬支架101包括行走机构横向支撑底座126和行走机构纵向支撑底座125,所述行走机构横向支撑底座126两端分别固定安装在八边形框架的两个八边形环43的一个边上,两个行走机构纵向支撑底座125分别固定安装在行走机构横向支撑底座126两端,形成攀爬支架101,攀爬支架101与八边形框架固定相连,形成整体框架结构。
50.如图3和图4所示,所述攀爬动力装置为固定于行走机构纵向支撑底座125上的行走电机129,每个浮动支撑板145的两个攀爬主轴141之间通过同步带相连,其中一个攀爬主轴141通过浮动动力传递机构与行走电机129,所述浮动动力传递机构包括第一传动轴120、第一圆锥齿轮组、伸缩主轴、第二转动轴132和第二圆锥齿轮组,所述伸缩主轴一端通过第一圆锥齿轮组与第一传动轴120相连,第一传动轴120与行走电机129相连;
51.伸缩主轴的另一端通过第二圆锥齿轮组与第二转动轴132相连,第二转动轴132安装在浮动支撑板145上,且与攀爬主轴141动力传动相连,伸缩主轴的伸缩方向与径向滑动机构的滑动方向相同。
52.具体的,如图4所示,行走电机129固定安装在行走机构纵向支撑底座125上,电机输出轴同步轮123固定安装在电机输出轴124上;光轴下支撑座128固定安装在行走机构纵向支撑底座125上,第一传动轴120可转动的安装在光轴下支撑座128上,第一传动轴同步轮119固定的安装在第一传动轴120上,第一同步带122套设在电机输出轴同步轮123和第一传动轴同步轮119上进行动力传递;
53.第一传动轴圆锥齿轮121固定安装在第一传动轴120上,支撑光轴116固定安装在光轴下支撑座128上,长半轴伸缩主轴支座117固定安装在支撑光轴116上,长半轴伸缩主轴115转动的安装在长半轴伸缩主轴支座117上,且下端向下伸出,长半轴伸缩主轴圆锥齿轮118固定在长半轴伸缩主轴115的下端,长半轴伸缩主轴圆锥齿轮118与第一传动轴圆锥齿轮121垂直啮合进行动力传递,形成第一圆锥齿轮组;
54.短半轴伸缩主轴114可轴向滑动的安装在长半轴伸缩主轴115内,短半轴伸缩主轴114和长半轴伸缩主轴115一起构成伸缩主轴,为了便于伸缩主轴自由伸缩并且可以传递扭转动力,所述长半轴伸缩主轴115内设有十字截面滑孔127,所述短半轴伸缩主轴114下端对应的设置为十字截面滑块;
55.支撑光轴上半轴135固定安装在支撑光轴116上(当然也可以和支撑光轴116一起设置为一根轴),光轴上支撑座134(内设滑孔)滑动安装支撑光轴上半轴135上,形成用于安装浮动支撑板145的滑动副,浮动支撑板145固定在光轴上支撑座134上;
56.短半轴伸缩主轴支座113固定安装在光轴上支撑座134上,短半轴伸缩主轴114可转动的安装在短半轴伸缩主轴支座113内,且向上伸出,短半轴伸缩主轴圆锥齿轮136固定
安装在向上伸出的短半轴伸缩主轴114顶部;
57.第二传动轴132可转动安装在光轴上支撑座134上,第二传动轴圆锥齿轮133固定的安装在第二传动轴132上,第二传动轴圆锥齿轮133与短半轴伸缩主轴圆锥齿轮136垂直啮合,进行动力传递,形成第二圆锥齿轮组;
58.第二传动轴同步轮130固定安装在第二传动轴132上,第二传动轴同步带131一端套设安装在第二传动轴同步轮130上,另一端连接设于其中一个攀爬主轴141上的同步轮(该攀爬主轴141上设有两个同步轮)。
59.攀爬主轴同步轮137固定安装在攀爬主轴141上,攀爬主轴同步带138分别转动连接在两个攀爬主轴同步轮137上,通过攀爬主轴同步带138保证两个攀爬主轴141同步转动。
60.通过浮动动力传递机构使得,攀爬机构既能在径向浮动,以完成行走攀爬功能,又能与行走电机129保持稳定的动力传递连接。
61.如图3所示,所述第一径向弹性装置102包括高弹力弹簧支座112、高弹力弹簧111和两根限位光轴110,所述高弹力弹簧支座112固定于攀爬支架101上,具体,固定安装在行走机构纵向支撑底座125上,高弹力弹簧支座112设有供所述限位光轴110自由滑动的滑孔,所述浮动体109固定于所述限位光轴110的顶端,限位光轴110下端安装在滑孔内,所述高弹力弹簧111套设于限位光轴110上,且位于浮动体109和高弹力弹簧支座112之间,通过所述高弹力弹簧111使得浮动体109远离高弹力弹簧支座112紧贴在凸轮140上,本发明实施例中,所述浮动体109上设有与凸轮140接触平滑过渡的凹面。
62.作为一种优选实施例,如图1和图2所示,相邻攀爬机构的两个相邻的第一传动轴120之间通过万向节装置动力传动相连。
63.如图2所示,所述万向节装置包括第一连接轴103、第一万向节104、万向节中间轴107、第二万向节105和第二连接轴106,所述第一连接轴103和第二连接轴106分别与两个相邻的第一传动轴120相连,所述万向节中间轴107一端通过第一万向节104与第一连接轴103相连,另一端通过第二万向节105与第二连接轴106相连。
64.作为一种优选实施例,如图2、5、6所示,所述行走履带155包括高摩擦力履带144、履带轮内部驱动轮148、两个履带支撑侧板143和履带轮内部驱动电机153,两个履带支撑侧板143通过连接件相连形成行走履带155的整体支撑架,多个履带轮内部驱动轮148设于两个履带支撑侧板143之间,所述高摩擦力履带144套设在所述履带轮内部驱动轮148上形成行走履带155;所述履带支撑侧板143外侧面固定设于曲轴142支撑圆环139,所述曲轴142支撑圆环139可转动的与曲轴142端部相连,以实现铰接。
65.本实施例中,如图6所示,所述多个履带轮内部驱动轮148有四个,两个一组,每组的两个履带轮内部驱动轮148通过齿轮传递动力,具体的,所述履带轮内部驱动轮主轴146转动的安装在两个履带支撑侧板143之间,履带轮内部驱动轮齿轮147固定安装在履带轮内部驱动轮主轴146上,履带轮内部驱动轮148固定安装在履带轮内部驱动轮主轴146上,履带轮内部半轴149转动连接在履带支撑侧板143上,履带轮内部半轴齿轮150固定连接在履带轮内部半轴149上,并且履带轮内部半轴齿轮150与其相邻的两个履带轮内部驱动轮齿轮147啮合,以实现同一组的两个履带轮内部驱动轮148同步转动;
66.所述履带轮内部驱动电机153为贯穿轴电机,履带轮内部驱动电机主轴152转动安装在履带支撑侧板143上,履带轮内部驱动电机153通过连接件(图中未显示出)固定在两个
履带支撑侧板143之间,履带轮内部驱动电机皮带轮154固定安装在履带轮内部驱动电机主轴152上,与履带轮内部驱动电机153相邻的履带轮内部驱动轮主轴146上设有一个同步带轮,并通过履带轮内部动力传输皮带151与履带轮内部驱动电机皮带轮154相连,进行动力传递。
67.如图7至图9所示,所述径向平衡模块2包括全向轮215、平衡电机、第二径向弹性装置和截面形状与机器人框架4相同的径向平衡支架201,所述径向平衡支架201固定安装在机器人框架4端部,所述全向轮215至少有三个,本发明实施例中与攀爬机构对应设置,一共四组,每组两个;多个全向轮215分别通过第二径向弹性装置安装在径向平衡支架201上,且在径向平衡支架201内周向均匀分布,通过第二径向弹性装置使得全向轮215紧密低靠在斜拉索上,每个全向轮215均设有一个与之动力相连的平衡电机(本实施例中为直流电机218),平衡电机的轴向与斜拉索轴向平行,所述全向轮215上设有若干与斜拉索接触的滚动体221,所述滚动体221的滚动方向与斜拉索轴向平行。
68.如图8和图9所示,所述第二径向弹性装置包括间隙调整螺母204、径向平衡模块下底板205、压力弹簧下底板206、压力弹簧限位轴207、压力弹簧208、压力弹簧上底板209、径向平衡模块上底板210、径向平衡装置光轴支撑座底板211、径向平衡装置光轴212、径向平衡装置光轴支撑座213和光轴座端联轴器214,径向平衡支架201固定安装在机器人框架4尾端,径向平衡模块下底板支撑架202固定在径向平衡支架201上,径向平衡模块下底板205固定安装在径向平衡支架201上,每个径向平衡模块下底板205通过两个径向平衡模块下底板支撑架202支撑安装;
69.压力弹簧下底板206固定安装在径向平衡模块下底板205上,压力弹簧208一端固定安装在压力弹簧下底板206上,另一端固定在压力弹簧上底板209上;压力弹簧限位轴207一端固定安装在压力弹簧上底板209上,另一端为调整间隙的螺纹端203,螺纹端203自由穿过设于压力弹簧下底板206及径向平衡模块下底板205上的滑孔,并在径向平衡模块下底板205另一侧通过间隙调整螺母204紧固;所述压力弹簧208套设于压力弹簧限位轴207上,通过压力弹簧限位轴207防止压力弹簧208跑偏,通过压力弹簧208的弹性保持压力弹簧上底板209和压力弹簧下底板206之间为具有弹性的恒定距离,通过拧紧或拧松间隙调整螺母204,能调整压力弹簧上底板209和压力弹簧下底板206之间的初始距离,达到调整全向轮215与斜拉索之间距离或者接触力大小的目的。
70.径向平衡模块上底板210固定安装在压力弹簧上底板209上,作为全向轮215的安装平台,径向平衡装置光轴支撑座底板211固定安装在径向平衡模块上底板210上,径向平衡装置光轴支撑座213固定安装在径向平衡装置光轴支撑座底板211上,径向平衡装置光轴212转动的安装在径向平衡装置光轴支撑座213上,光轴座端联轴器214一端与径向平衡装置光轴212固定相连,另一端连接全向轮215的一侧,电机端联轴器220一端固定安装在全向轮215另一侧上,电机端联轴器220的另一端与电机减速器219的输出轴上;
71.减速电机支撑座217固定安装在径向平衡模块上底板210上,电机减速器219固定安装在减速电机支撑座217上,直流电机218的输出轴与电机减速器219的输入轴相连,光电编码器216固定安装在直流电机218上,用于检测直流电机218的转速,压力弹簧208的作用可以使全向轮215与斜拉索紧密贴合,通过全向轮215上的滚动体221可以使得全向轮215在斜拉索上无障碍滚动,降低摩擦力,一旦机器人框架4的中心线与斜拉索轴线发生偏移,即
可停止行走,启动直流电机218,驱动全向轮215侧向转动,该转动的方向与滚动体221的转动方向垂直,即可调整机器人框架4与斜拉索偏离角度,使得机器人框架4的中心线与斜拉索轴线再次重合,然后停掉直流电机218,再次启动行走模块1进行行走。
72.如图10所示,所述ai缺陷检测模块3包括ai缺陷检测框架301和若干ai缺陷检测相机304,所述ai缺陷检测框架301固定在机器人框架4端部,所述ai缺陷检测相机304通过相机支架安装在ai缺陷检测框架301上。具体的,所述相机支架包括ai相机支撑横梁303和圆柱形支撑302,圆柱形支撑302固定安装在ai缺陷检测框架301上,ai相机支撑横梁303固定安装在圆柱形支撑302上,ai缺陷检测相机304固定安装在ai相机支撑横梁303上,ai缺陷检测相机304主要负责对大桥斜拉索的钢缆进行质量检测,ai缺陷检测相机304预置视觉缺陷检测算法(具体算法为现有技术,并非本发明的发明点,在极端情况下,也可以人工检测)。
73.以上实施方式仅用于说明本发明,而非对本发明的限制。尽管参照实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,对本发明的技术方案进行各种组合、修改或者等同替换,都不脱离本发明技术方案的精神和范围,均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1