一种PH胶囊操作装置及检测仪器的制作方法
一种ph胶囊操作装置及检测仪器
技术领域
[0001]
本实用新型涉及食道ph值检测技术领域,更具体地说,涉及一种ph胶囊操作装置以及包括上述ph胶囊操作装置的检测仪器。
背景技术:
[0002]
当前一种名为无线ph胶囊检测系统的产品,其主要原理为在受检者的食道指定位置挂一颗胶囊状设备,在规定时间内(一般为96小时),采集食道的ph值,以确定受检者是否出现胃酸反流的现象,以及反流现象的严重程度,为医生诊断提供数据支撑。现目前无线ph胶囊是以一个导向装置送达受检者食管的指定位置,并在负压装置辅助下,将食道粘膜吸一部分至胶囊体内,然后由医生完成胶囊挂于食管壁上的操作。待胶囊完成工作后,会在一周只能完成自动的脱落,最后由下消化道排出体外。
[0003]
当前的ph胶囊的操作过程为,医生将ph胶囊直接挂于食管壁上。挂的过程,会涉及到导向,负压吸引等装置。无线ph胶囊由制造商直接装配于导向装置上,导向装置会有刻度标记,指引目标位置深度。当插入受检者食道指定位置后,医生会启动负压吸引装置,待负压达到指定数值(一般为0.08kpa),医生会操作导向装置手柄上的数个拉扣(现有产品一般为3个),顺序完成胶囊穿刺食道壁粘膜以及胶囊脱离导向装置的动作。这个过程比较复杂,且需要医生完成的操作较多,虽有拉扣顺序的标记,但如果出现误操作,则该套ph胶囊与导向装置则均失效,只能重新使用另一套装置再次完成该过程。
[0004]
综上所述,如何提供一种方便操作的ph胶囊操作装置,是目前本领域技术人员亟待解决的问题。
技术实现要素:
[0005]
有鉴于此,本实用新型的目的是提供一种ph胶囊操作装置,该装置操作过程中能够通过简单动作实现胶囊的布置,快捷方便。
[0006]
本实用新型的另一目的是提供一种包括上述ph胶囊操作装置的检测仪器。
[0007]
为了实现上述目的,本实用新型提供如下技术方案:
[0008]
一种ph胶囊操作装置,包括输送器、设于所述输送器一端的ph胶囊以及另一端的操作手柄;所述ph胶囊设有挂钩,所述操作手柄设有控制所述挂钩的控制件以及为所述ph胶囊吸附目标位置提供负压的负压腔室;
[0009]
所述控制件移动至第一位置时,所述挂钩穿刺目标位置;所述控制件移动至第二位置,所述控制件控制所述挂钩切断所述输送器与所述ph胶囊的连接,并脱离所述挂钩、控制所述负压腔室泄压。
[0010]
优选的,所述挂钩转动设置于所述ph胶囊,所述挂钩连接绳线的一端,所述控制件包括:
[0011]
拉扣,其可移动的设于所述操作手柄;
[0012]
第一动作钢丝,其一端连接于所述拉扣,另一端具有第一通孔;
[0013]
第二动作钢丝,其过盈配合设置于所述输送器,所述第二动作钢丝的第一端连接于所述第一动作钢丝中部,第二端相较于所述第一通孔靠近于所述挂钩;
[0014]
所述绳线的另一端穿过所述第一通孔并套在所述第二动作钢丝的第二端;
[0015]
所述控制件由初始位置移动至第一位置时,所述第二动作钢丝不跟随所述第一动作钢丝移动;所述控制件由第一位置移动至第二位置时,所述第一动作钢丝带动所述第二动作钢丝脱离所述输送器并同步移动。
[0016]
优选的,所述第二动作钢丝的第一端包括折弯段,以使所述第一动作钢丝的第一阶段运动不带动所述第二动作钢丝移动。
[0017]
优选的,所述第二动作钢丝的第一端通过弹性连接件连接于所述第一动作钢丝。
[0018]
优选的,所述ph胶囊设置有吸附腔,所述吸附腔通过所述输送器连通所述负压腔室,所述挂钩设于所述吸附腔内。
[0019]
优选的,所述ph胶囊与所述输送器通过固定线绳连接,所述控制件移动至所述第二位置时,所述挂钩旋转并割断所述固定线绳。
[0020]
优选的,所述挂钩上设置有刀片,所述控制件移动至所述第二位置时,所述刀片划过所述固定线绳。
[0021]
优选的,所述负压腔室设有负压通孔,所述负压通孔中密封设置密封杆,所述控制件连接所述密封杆,所述控制件移动至第二位置时,所述密封杆移动至将所述负压腔室与外部连通的位置。
[0022]
优选的,所述负压腔室设置有密封件,所述密封件设有两个所述负压通孔,所述密封杆为中空的、两端分别插入对应的所述负压通孔的u形管件,u形管件的两侧均设有连通孔;
[0023]
所述控制件移动至第二位置时,所述负压腔室通过所述u形管件连通外部。
[0024]
一种检测仪器,包括上述任一项所述的ph胶囊操作装置。
[0025]
本申请提供的ph胶囊操作装置,利用控制件移动至不同位置的状态,带动挂钩移动,实现对目标位置的连接固定,并通过控制件移动形成输送器和ph胶囊的分离,以及ph胶囊的负压环境的取消。利用控制件的不同位置实现连续的若干个操作,能够方便简化现有技术的操作步骤,仅通过一个控制件即能够完成控制所有的步骤,方便操作人员以简单操作完成所有步骤,降低了对操作人员的操作水平的要求,提高了ph胶囊的设置效率。
[0026]
本申请还提供了一种包括ph胶囊操作装置的检测仪器。
附图说明
[0027]
为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
[0028]
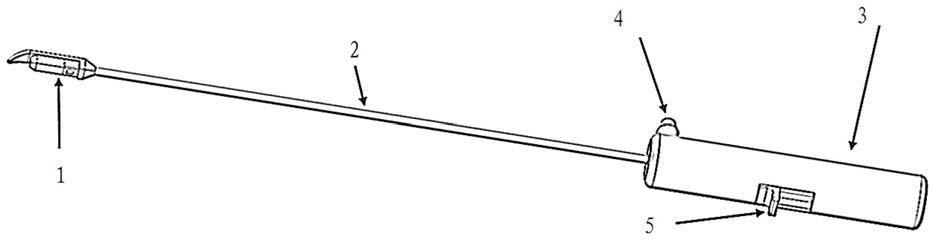
图1为本实用新型所提供的ph胶囊操作装置的结构示意图;
[0029]
图2为本实用新型所提供具ph胶囊与输送器内部的连接示意图;
[0030]
图3为初始状态时ph胶囊的示意图;
[0031]
图4为初始状态时操作手柄的示意图;
[0032]
图5为胶囊中挂钩刺穿目标的示意图
[0033]
图6为第一动作钢丝和第二动作钢丝的结构示意图;
[0034]
图7为初始状态动作钢丝的示意图;
[0035]
图8为折弯段拉直后的示意图;
[0036]
图9为控制件处于第一位置的示意图;
[0037]
图10为初始状态固定线绳和挂钩的示意图;
[0038]
图11为固定线绳即将被切割的示意图;
[0039]
图12为密封杆的示意图;
[0040]
图13为密封杆处于连通负压腔室状态的示意图;
[0041]
图14为负压腔室解除负压状态后的气流流通方向示意图;
[0042]
图15为控制件处于第二位置的示意图。
[0043]
图1-15中:
[0044]
1为ph胶囊、2为输送器、3为操作手柄、4为负压进气口、5为拉扣;
[0045]
11为挂钩、12为绳线、13为刀片、14为固定线绳;
[0046]
41为负压腔室、42为密封件;
[0047]
51为第一动作钢丝、52为第二动作钢丝、521为折弯段、53为密封杆、54为连通孔。
具体实施方式
[0048]
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
[0049]
本实用新型的核心是提供一种ph胶囊操作装置,该装置操作过程中能够通过简单动作实现胶囊的布置,快捷方便。
[0050]
本实用新型的另一目的是提供一种包括上述ph胶囊操作装置的检测仪器。
[0051]
本申请的ph胶囊操作装置用于将ph胶囊1设置在生物体内的目标位置。具体地,ph胶囊操作装置包括输送器2、设于输送器2一端的ph胶囊1以及另一端的操作手柄3;ph胶囊1设有挂钩11,操作手柄3设有控制挂钩11的控制件以及为ph胶囊1吸附目标位置提供负压的负压腔室41;
[0052]
控制件移动至第一位置时,挂钩11穿刺目标位置;控制件移动至第二位置,控制件控制挂钩11切断输送器2与ph胶囊1的连接,并脱离挂钩11、控制负压腔室41泄压。
[0053]
其中,输送器2包括管件结构,用于连接操作手柄3和ph胶囊1,操作手柄可以用于向ph胶囊1提供负压压力,例如在操作手柄3上设置负压进气口4,并连接于ph胶囊1的吸附面上。
[0054]
ph胶囊1设置有可转动或可移动的挂钩11,挂钩11与操作手柄3的控制件连接,控制件控制挂钩11动作,挂钩11可以通过移动或转动,勾连目标位置,形成与目标位置的固定。
[0055]
控制件对挂钩11的控制分为不同阶段,当控制件移动至第一位置时,称当前状态为第一状态,挂钩11由初始状态进行转动或移动,勾住目标位置。在此之前,负压腔室41向
ph胶囊1提供负压,使ph胶囊1吸附住目标位置。
[0056]
当勾住后,可以继续操作控制件,使控制件移动到第二位置,称当前状态为第二状态,控制件控制挂钩11继续移动或转动,以使挂钩将输送器2和ph胶囊1的连接切断,具体地,输送器2和ph胶囊1的连接可以通过柔性件捆绑固定或栓接固定,当挂钩11的动作将该柔性件切断,即第二位置状态下,输送器2和ph胶囊1为断开状态。同时控制件位于第二位置时,能够控制负压腔室41与其外部连通,从而形成负压腔室41内部的负压环境的解除,使得ph胶囊1的负压状态解除。
[0057]
需要说明的是,解除负压环境的方法很多种,例如控制件由第一位置移动至第二位置的移动,可以将负压腔室41的通气口推开。
[0058]
本申请提供的ph胶囊操作装置,利用控制件移动至不同位置的状态,带动挂钩11移动,实现对目标位置的连接固定,并通过控制件移动形成输送器2和ph胶囊1的分离,以及ph胶囊1的负压环境的取消。利用控制件的不同位置实现连续的若干个操作,能够方便简化现有技术的操作步骤,仅通过一个控制件即能够完成控制所有的步骤,方便操作人员以简单操作完成所有步骤,降低了对操作人员的操作水平的要求,提高了ph胶囊1的设置效率。
[0059]
在上述实施例的基础之上,挂钩11转动设置于ph胶囊1,挂钩11连接绳线12的一端。具体地,控制件包括:
[0060]
拉扣5,可移动的设于操作手柄3;
[0061]
第一动作钢丝51,其一端连接于拉扣5,另一端具有第一通孔;
[0062]
第二动作钢丝52,过盈配合设置于输送器2,第二动作钢丝52的第一端连接于第一动作钢丝51中部,第二端相较于第一通孔靠近于挂钩11;
[0063]
绳线12的另一端穿过第一通孔并套在第二动作钢丝52的第二端;
[0064]
控制件由初始位置移动至第一位置时,第二动作钢丝不跟随第一动作钢丝51移动;控制件由第一位置移动至第二位置时,第一动作钢丝51带动第二动作钢丝52脱离输送器2并同步移动。
[0065]
需要说明的是,第一动作钢丝51的第二端可以通过弯折形成第一通孔,或者第一动作钢丝51的直径较大时,也直接钻取设置第一通孔。
[0066]
本实施例中挂钩11铰接于ph胶囊1的形成负压腔的内部,当贴近目标位置时,负压作用吸附目标位置,挂钩11的转动能够直接刺入目标位置。
[0067]
第一动作钢丝51的第一端连接拉扣5,第二端的第一通孔中穿入绳线12。
[0068]
第二动作钢丝52的中部过盈固定在输送器2的空中,第二动作钢丝52与第一动作钢丝51基本为平行状态,第二动作钢丝52的第一端连接第一动作钢丝51,第二动作钢丝52的第二端位于第一动作钢丝51的第二端与挂钩11之间。
[0069]
上述绳线12可以为双股的绳线12,其一端连接挂钩11,双股的绳线12穿过第一通孔后,套在第二动作钢丝52的第二端。可选的,上述绳线12可以为单股,相应地,与挂钩11、第二动作钢丝52的第二端的连接,可以通过端部结绳结形成。考虑到绳线12最终需要与第二动作钢丝52脱离,因此绳线12在第二动作钢丝52的第二端为可移动的套接。
[0070]
在移动的第一阶段,第二动作钢丝52不跟随第一动作钢丝51移动,在第二阶段,第一动作钢丝51的移动带动第二动作钢丝52同步移动,以上效果可以通过多种方式实现,例如,第二动作钢丝52套在第一动作钢丝51上,第一动作钢丝51上具有限位结构,仅有在移动
至一定位置时,才会带动第二动作钢丝52的移动。
[0071]
使用时,首先,通过控制件控制第一动作钢丝51移动,以便通过第一通孔将绳线12向远离ph胶囊1的位置拉动,使得挂钩11进行旋转,刺穿目标位置,在这个过程中,第二动作钢丝52不跟随第一动作钢丝51移动;
[0072]
然后,继续通过控制件控制第一动作钢丝51移动,以使控制件由第一位置移动至第二位置时,第一动作钢丝51带动第二动作钢丝52脱离输送器2并同步移动。第二动作钢丝52仅有在第二阶段才会被带动,脱离与输送器2的过盈配合。
[0073]
本实施例中利用控制件带动第一动作钢丝51和第二动作钢丝52的不同阶段的操作,实现在第一阶段仅拉动挂钩11,第二阶段完成后续的脱离操作。动作钢丝的设置方式简单,且易于操作,成本较低。
[0074]
在上述实施例的基础之上,第二动作钢丝52的第一端包括折弯段521,折弯段521的角度小于90度,以使第一动作钢丝51的第一阶段运动不带动第二动作钢丝52移动。
[0075]
第二动作钢丝52的折弯段521的端部连接在第一动作钢丝51,在最初第一动作钢丝51移动过程中,折弯段521被第一动作钢丝51带动逐渐进行转动,角度逐渐增大,并与第二动作钢丝52的主体形成直线结构,直到此时,第二动作钢丝52的主体始终保持与输送器2的过盈配合而固定不动。
[0076]
此时,第一动作钢丝51继续移动,将能够带动第二动作钢丝52移动,由于绳线12套在第二动作钢丝52的第二端,因此第二动作钢丝52远离绳线12的移动,能够使绳线12脱离第二动作钢丝52的第二端,在脱离第二动作钢丝52的第二端后,绳线12会从第一动作钢丝51的第一通孔中脱离,从而绳线12与控制件脱离。
[0077]
在上述实施例的基础之上,第二动作钢丝52的第一端通过弹性连接件连接于第一动作钢丝51。弹性连接件能够使第二动作钢丝52滞后于第一动作钢丝51的移动。第一动作钢丝51的初始移动仅使弹性连接件的长度伸长,并不影响另一端连接的第二动作钢丝52。
[0078]
可选的,上述弹性连接件还可以选用其他柔性件,以起到相同的作用。
[0079]
在上述任意一个实施例的基础之上,ph胶囊1设置有吸附腔,吸附腔通过输送器2连通负压腔室41,挂钩11设于吸附腔内。
[0080]
在上述任意一个实施例的基础之上,ph胶囊1与输送器2通过固定线绳14连接,控制件移动至第二位置时,挂钩11旋转并割断固定线绳14。
[0081]
可选的,挂钩11上设置有刀片13,控制件移动至第二位置时,刀片13划过固定线绳14。
[0082]
可选的,ph胶囊1与输送器2之间也可以通过其他结构连接,并用挂钩11上的刀片13进行切割。
[0083]
在上述任意一个实施例的基础之上,负压腔室41设有负压通孔,负压通孔中密封设置密封杆53,控制件连接密封杆53,控制件移动至第二位置时,密封杆53移动至将负压腔室41与外部连通的位置。
[0084]
在上述任意一个实施例的基础之上,负压腔室41设置有密封件42,密封件42设有两个负压通孔,密封杆53为中空的、两端分别插入对应的负压通孔的u形管件,u形管件的两侧均设有连通孔54;控制件移动至第二位置时,负压腔室41通过u形管件连通外部。
[0085]
在一个具体的操作过程中,通过负压进气口4形成ph胶囊1的负压状态,在负压条
件下,将食道粘膜组织吸引至ph胶囊1上的穿刺孔内,负压的条件保持几秒的时间,拉动拉扣5,触发操作手柄3上的动作部分,拉动过程中依次完成穿刺、胶囊脱离、解除负压或穿刺、胶囊脱离的动作。
[0086]
完成穿刺动作是移动拉扣5,使得固结在拉扣5上的第一动作钢丝51和第二动作钢丝52后退,以拉动穿在挂钩11上的尼龙线,使得挂钩11绕中心轴旋转,穿刺在被吸入穿刺孔内的粘膜组织上。初始状态时,第一动作钢丝51和第二动作钢丝52未运动,尼龙线处于松弛的状态,挂钩11处于ph胶囊1的腔体内、未暴露在腔体端口,以防止影响粘膜组织的进入。然后通过拉扣5触发拉紧状态,在第一动作钢丝51作用下,尼龙线向拉扣5运动的方向被拉紧,使得挂钩11旋转,此时挂钩11上穿尼龙线的孔会在拉动力的作用下旋转到靠近输送器2管身的角度,此时挂钩11的锋利尖端便会从隐藏部分伸出,穿刺在被吸附的粘膜上。此时,ph胶囊1与输送器2仍为连接状态。
[0087]
此时,继续推动拉扣5向操作手柄3末端运动,此时第二动作钢丝52会被第一动作钢丝51拉动,并脱离过盈配合的位置,并远离ph胶囊1,远离尼龙绳,穿在第一动作钢丝51上的尼龙线会从第二动作钢丝52上脱离,再从第一动作钢丝51的第一通孔中脱离。初始状态不受力时候,第二动作钢丝52与输送器2为过盈连接,以保持尼龙线不会从第一动作钢丝51中滑落出来,当移动的行程足够时,第二动作钢丝52从过盈连接中脱离,使得尼龙线不再缠绕在第一动作钢丝51,然后再穿过第一动作钢丝51有孔端脱离开来。
[0088]
在脱离之前,尼龙绳会带动挂钩11旋转,以使挂钩11的刀片13切割输送器2与ph胶囊1连接的固定线,从而使二者发生脱离。在初始状态时,刀片13与固定线绳14不接触,当到达钢丝行程的末端时,刀片13切断固定线绳14,使得ph胶囊1与输送器2脱离开。ph胶囊1与输送器2完成脱离的过程较为短暂,尼龙线与固定线绳14的脱离先后对于实际的脱离效果影响不大。
[0089]
在完成以上脱离后,控制件移动至将负压腔室41的密闭性破坏的位置,从而解除对ph胶囊1的负压操作。
[0090]
以上提供的ph胶囊操作装置简化了医生在使用该器械时候的操作流程,同时也降低了医护在使用该器械时出现误操作顺序的情况,也因此会降低该器械的使用成本。
[0091]
除了上述各个实施例中所提供的ph胶囊操作装置的主要结构和连接关系,本实用新型还提供一种包括上述实施例公开的检测仪器,该检测仪器除了ph胶囊操作装置以外,还包括抽负压装置等,该检测仪器的其他各部分的结构请参考现有技术,本文不再赘述。
[0092]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
[0093]
以上对本实用新型所提供的ph胶囊操作装置和检测仪器进行了详细介绍。本文中应用了具体个例对本实用新型的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实用新型的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以对本实用新型进行若干改进和修饰,这些改进和修饰也落入本实用新型权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1