一种夏季建筑施工用混凝土养护覆膜装置及使用方法与流程
1.本发明涉及混凝土覆膜装置技术领域,具体为一种夏季建筑施工用混凝土养护覆膜装置及使用方法。
背景技术:
2.通常在建筑施工现场中,主体结构的混凝土楼板、楼梯等部位在浇筑完毕后要进行振捣、抹压,再进行覆膜养护。在混凝土初凝之后终凝之前,人工进行混凝土养护薄膜的铺贴,使混凝土养护薄膜和混凝土表面紧密结合,促进混凝土的水化效应,在混凝土的覆膜养护过程中起到防裂保湿的作用,传统的覆膜方法是在混凝土表面人工铺贴混凝土养护薄膜,但是传统的铺贴方法需要多名工人操作,而且由于薄膜与混凝土之间存在空气,事后还需要人为去压薄膜来使其与混凝土表面紧密贴合,导致工作量大,使得覆膜养护操作的效率低。
3.如现有公开号为cn107956291b的中国专利所公开的一种混凝土覆膜工具,其技术方案要点是包括支架,所述支架上设置有压板以及薄膜辊筒,所述薄膜辊筒与支架转动连接,所述压板竖向升降连接在支架上,所述薄膜辊筒上设置有联动压板往复升降下压薄膜的联动机构,这样只需将薄膜一端固定后,再推动薄膜辊筒在混凝土表面上滚动即可展开薄膜使得其铺在混凝土表面上,且在薄膜辊筒滚动的同时借助联动机构联动压板往复升降下压薄膜,使得铺设的薄膜与混凝土表面贴合的更加紧密,使得铺设薄膜和下压薄膜操作同步进行,从而有效提高覆膜养护的操作效率。
4.上述的现有技术方案存在以下缺陷:上述方案需要人为拉动装置移动,人为将薄膜铺设在混凝土表面自动化程度较低,对人力需求较大。
技术实现要素:
5.针对现有技术存在的不足,本发明的目的在于提供一种夏季建筑施工用混凝土养护覆膜装置及使用方法,其具有的优点是本发明通过采用多个机构和控制核心的相互配合使整个装置自动化程度提高,在实现对混凝土进行覆膜的同时使整个装置对人需要执行的工作内容需求减小,提高了作业效率。
6.本发明的上述目的是通过以下技术方案得以实现的:
7.一种夏季建筑施工用混凝土养护覆膜装置及使用方法,包括驱动机构,所述驱动机构包括履带底盘、控制核心,所述履带底盘上部分别固定连接有支架和所述控制核心,所述支架包括立杆,所述立杆底部固定连接于所述履带底盘,所述立杆分别固定连接有振平机构、覆膜机构,所述振平机构包括第一横杆,所述第一横杆一端固定连接于所述立杆侧壁,所述第一横杆另一端固定连接有第一竖杆的一端,所述第一竖杆另一端固定连接有第一伸缩杆,所述第一伸缩杆伸缩方向竖直,所述第一伸缩杆底端固定连接有振平板,所述第一伸缩杆外侧套设有第一压簧,所述第一压簧一端抵接于所述振平板,另一端抵接于所述第一竖杆,所述振平板上方固定连接有振动电机,所述立杆顶部固定连接有警示灯、蜂鸣
器;
8.所述控制核心包括控制模块和无线信号接收模块,所述无线信号接收模块相匹配有无线信号发射模块,所述无线信号发射模块固定连接有无线遥控器。
9.通过采用上述技术方案,在现有覆膜机的原理基础上通过增加履带底盘、控制核心驱动机构实现了本装置的自动前进及自动停止,履带底盘对未完全固化的混凝土地面的压强相较于人对地面的压强来说小了许多,这样就减小了本装置对混凝土地面影响,使后面的振平机构更易实现对混凝土表面的收光,覆膜机构在控制核心的辅助下可自动实现由从薄膜辊筒上自动撕膜到将薄膜覆盖在混凝土表面以及后续剪断薄膜的一系列功能,振平机构可将履带底盘产生在混凝土上的印记自动振平,工作人员只需通过装有无线信号发射模块的无线遥控器即可实现对本装置的操控,进而实现对混凝土的覆膜,整个装置自动化程度相比现有方案有很明显的提高,在实现对混凝土进行覆膜的同时使整个装置对人需要执行的工作内容需求减小,提高了作业效率。
10.本发明在一较佳示例中可以进一步配置为:所述覆膜机构包括送膜机构、撕膜机构、铺膜机构、裁膜机构,所述送膜机构包括第二横杆,所述第二横杆一端固定连接于所述立杆侧壁,所述第二横杆另一端固定连接有第一电机,所述第一电机输出端轴线水平,所述第一电机输出端固定连接有转轮的一端,所述转轮另一端转动连接于所述第一横杆,所述转轮两端对称连接有支撑盘,所述支撑盘周侧均布有若干夹头机构,所述夹头机构包括第二压簧,所述第二压簧一端固定连接于所述支撑盘,所述第二压簧另一端固定连接有固定块一端,所述固定块另一端转动连接有圆锥抵件,两对称所述圆锥抵件之间夹有薄膜辊筒,所述薄膜辊筒上绕设有薄膜本体。
11.通过采用上述技术方案,设置了一个自动补充薄膜的机构,即送膜机构,送膜机构增加了薄膜的供应量,使本装置一次可携带多卷薄膜,增加了装置的持续工作时间,同时通过采用电机带动转轮,为实现薄膜的自动补充功能提供了硬件基础,夹头机构的作用首先在于为薄膜辊筒提供稳定的支撑基础,其次便于工作人员对空辊筒进行更换。
12.本发明在一较佳示例中可以进一步配置为:所述撕膜机构包括撕膜架,所述撕膜架底部固定连接有两个平行设置的第二伸缩杆,两个所述第二伸缩杆下端固定连接于所述振平板,所述第二伸缩杆外部套设有第三压簧,所述第三压簧一端抵接于所述振平板,另一端抵接于所述撕膜架,所述撕膜架侧面一端固定连接有第二电机,所述第二电机轴线水平,所述第二电机输出端固定连接有第一驱动轮,所述撕膜架侧面另一端转动连接有第一从动轮,所述第一驱动轮与所述第一从动轮表面用两个平行设置的第一连接带绕设,所述两条第一连接带之间留有间隙,所述第一连接带表面密布有若干第一通孔,所述撕膜架中部固定连接有第一吸气机构,所述第一吸气机构一侧抵接于所述第一连接带上段内表面,所述第一吸气机构远离所述薄膜辊筒一侧固定连接有第一接近开关,所述第一接近开关在竖直方向上位于两条第一连接带之间的间隙上,所述第二接近开关检测方向竖直向上。
13.通过采用上述技术方案,撕膜机构为装置实现自动将薄膜本体从薄膜辊筒上撕下的功能提供了部分硬件基础,其实现原理为当薄膜辊筒放置在第一连接带上之时,第二电机开始转动,第一吸气机构开始吸气,薄膜辊筒在第一连接带上滚动,薄膜本体的边缘于与第一连接带接触时,由于第一连接带表面密布有若干第一通孔,第一吸气机构通过第一通孔对第一连接带与薄膜辊筒接触地形成负压,这样会将薄膜本体从薄膜辊筒上撕下,与此
同时第一连接带也随第一电机的旋转而不断旋转,因此就将薄膜本体成功撕下并向前传送,第一接近开关的作用在于检测薄膜本体在撕膜机构上的具体位置,为控制核心提供反馈信号。
14.本发明在一较佳示例中可以进一步配置为:所述铺膜机构包括传膜机构与吸膜机构,所述传膜机构包括第三横杆,所述第三横杆一端固定连接于所述立杆上端,另一端分别固定连接有第一滑杆和第二竖杆,所述第二竖杆下端固定连接有第三电机,所述第一滑杆滑动连接有第二滑杆,所述第二滑杆滑动方向水平,所述第二滑杆滑动连接有第一滑块,所述第一滑块滑动方向竖直,所述第一滑块上部铰接有铰接块,所述铰接块固定连接有第一连杆一端,所述第一连杆另一端滑动连接有第二滑块,所述第二滑块固定连接于所述第三电机,所述第一连杆外部套设有第四压簧,所述第四压簧一端抵接于所述铰接块,另一端抵接于所述第二滑块,所述第二滑块底部固定连接于所述吸膜机构。
15.通过采用上述技术方案,传膜机构为本装置实现自动将薄膜本体铺至混凝土地面提供了硬件基础,第三横杆的作用在于支撑传膜机构的其它部件,使其正常运行,第一滑杆、第二滑杆、第二竖杆和第三电机等等其它传膜机构部件共同实现的功能是将吸膜机构从初始位置即常态位以一个直角的路径移动至混凝土地面,并且不使吸膜机构与水平面的夹角改变,且在移动的过程中不会影响到其它机构的运动,同时可以顺利的将吸膜机构从混凝土地面移动回至初始位置。
16.本发明在一较佳示例中可以进一步配置为:所述吸膜机构包括吸膜架,所述吸膜架固定连接于所述第二滑块下部,所述吸膜架下方一端固定连接有第四电机,所述第四电机输出端固定连接有第二驱动轮,所述吸膜架下方另一端转动连接有第二从动轮,所述第二从动轮外侧与所述第二驱动轮表面用两条平行设置的第二连接带连接,所述两条第二连接带之间留有间隙,所述第二连接带表面密布有若干第二通孔,所述吸膜架中部固定连接有第二吸气机构,所述第二吸气机构一侧抵接于所述第二连接带下段内表面,所述第二吸气机构一侧固定连接有第二接近开关,所述第二接近开关在竖直方向上位于两条第二连接带之间的间隙上,所述第二接近开关检测方向竖直向下。
17.通过采用上述技术方案,吸膜机构的作用就在于顺利将撕膜机构撕下的薄膜吸至自身下表面,从而保证后续步骤的顺利实施,其实现原理是第四电机带动第二驱动轮旋转,从而带动第二连接带旋转,第二吸气机构在第四电机启动的同时也启动,当薄膜本体经过第二吸气机构的竖直下方时第二吸气机构在薄膜本体与第二连接带之间形成负压,将薄膜本体紧紧吸在第二连接带表面,第二接近开关的作用在于检测薄膜本体在吸膜机构上的具体位置,为控制核心提供反馈信号。
18.本发明在一较佳示例中可以进一步配置为:所述第一吸气机构包括第一气箱,所述第一气箱固定连接于所述撕膜架,所述第一气箱上方固定连接有第一气箱盖,所述第一气箱盖上开设有若干第一贯穿孔,所述第一气箱盖上表面与所述第一连接带上段内表面相抵接,所述第一气箱通过第一气管连接有第一电动气阀,所述第一电动气阀连接有抽气泵,所述抽气泵固定连接于所述履带底盘,所述第二吸气机构包括第二气箱,所述第二气箱固定连接于所述吸膜架,所述第二气箱下方固定连接有第二气箱盖,所述第二气箱盖下表面与所述第二连接带下段内表面相抵接,所述第二气箱盖上开设有若干第二贯穿孔,所述第二气箱通过第二气管连接有第二电动气阀,所述第二电动气阀连接于所述抽气泵。
19.通过采用上述技术方案,实现了撕膜机构与吸膜机构对于第一吸气机构与第二吸气机构的功能要求,第一吸气机构中的第一气箱盖上开设有若干第一贯穿孔,这些第一贯穿孔与第一连接带上的第一通孔形成动态气孔通道,使第一吸气机构能在第一连接带上段外表面形成负压,从而成功将薄膜本体从薄膜辊筒上撕下,第二吸气机构结构与第一吸气机构的结构相似,原理也大致相同,二者分别通过第一电动气阀、第二电动气阀与抽气泵相连接,这样就可以通过控制第一电动气阀、第二电动气阀的开闭来实现对第一吸气机构,第二吸气机构的控制,且二者共用一个抽气泵,减小了抽气泵的使用数量,降低了生产成本。
20.本发明在一较佳示例中可以进一步配置为:所述裁膜机构包括电动伸缩杆,所述电动伸缩杆伸缩方向水平,所述电动伸缩杆一端固定连接于所述撕膜架,另一端固定连接有电热架,所述电热架固定连接有电热丝,所述电热丝水平设置。
21.通过采用上述技术方案,为装置实现自动割断薄膜本体提供了硬件基础,这样就可以代替人工实现割断薄膜本体这一动作,其原理是电热丝通电升温,电动伸缩杆推动电热架向前进,电热丝触碰到薄膜本体时用高温将其熔断,电热架为电热丝提供支撑基础。
22.本发明在一较佳示例中可以进一步配置为:所述控制模块分别电连接有振动电机、第一电机、第二电机、第三电机、第四电机、第一电动气阀、抽气泵、第二电动气阀、电动伸缩杆、电热丝、第一接近开关、第二接近开关。
23.通过采用上述技术方案,将控制模块与各个电动器件用电路相连接,使控制模块可以顺利控制各个电动器件,从而顺利实现整体功能。
24.本发明的系统运行流程为:
25.第一步:人工手动启动系统电源;
26.第二步;控制模块是否接收到通过无线信号接收模块传递的系统启动信号,如果有执行第三步,若没有则继续执行第二步。这一步的设置是为了不使装置在工作人员启动电源后装置立即运动起来从而产生意外伤到工作人员。
27.第三步;控制模块同时启动第二电机、第一电动气阀、第一接近开关;这时撕膜机构、第一吸气机构开始工作。
28.第四步;第一接近开关持续检测,检测薄膜本体是否存在,若未检测到薄膜本体则执行第五步,若检测到薄膜本体存在则执行第八步;这一步的目的在于检测撕膜机构有没有将薄膜本体成功撕下来,并根据其可能出现的两种情况做出后续解决方案。
29.第五步;控制模块控制第一电机转动一个固定角度;这一步的作用在于当薄膜辊筒上的薄膜本体被用完时送膜机构进行转动,更换新的薄膜辊筒,
30.第六步;控制模块检测第一电机累计旋转角度是否大于或等于三百六十度,若第一电机累计旋转角度小于三百六十度则执行第四步程序,若第一电机累计旋转角度大于或等于三百六十度则执行第七步,(注:每次本系统电源启动后第一电机角度计数清零);这一步的作用在于判断转轮上所有的薄膜辊筒上的薄膜本体是否均已被用完,当第一电机在系统启动后已转过三百六十度时,说明转轮上所有薄膜辊筒上的薄膜本体均已被用完,此时便需要停机更换新的薄膜辊筒了。
31.第七步;控制模块启动警示灯、蜂鸣器,同时关闭第二电机、第一电动气阀,之后需由工作人员手动关闭系统电源;这一步的作用便是停机并且提醒工作人员更换新的薄膜辊筒了。
32.第八步;控制模块同时关闭第二电机、第一接近开关;这一步的作用在于使薄膜本体不再继续向前移动,而是使其稳定停在当下的位置。
33.第九步;控制模块同时启动第二电动气阀、第四电机;这一步的作用在于启动吸膜机构。
34.第十步;控制模块启动第二接近开关,第二接近开关不间断检测薄膜本体是否出现在指定位置,若薄膜本体未出现则继续检测,若薄膜出现则执行下一步;这一步的作用在于检测薄膜本体是否到达时指定位置。
35.第十一步;控制模块控制第三电机转动一个固定角度;这一步的作用在于将被吸附在吸膜机构下表面的薄膜移动至混凝土表面。
36.第十二步;控制模块控制第二电动气阀关闭;这一步的作用在于使吸膜机构不再吸住薄膜本体,使薄膜本体可以顺利贴在混凝土表面。
37.第十三步;控制模块控制第一电动气阀关闭,控制履带底盘、振动电机启动;这一步的作用在于使装置开始启动起来。
38.第十四步;控制模块控制第三电机旋转回初始位置,控制第四电机、第二接近开关关闭;这一步的作用在于使送膜机构回复原位。
39.第十五步;控制模块控制第一接近开关打开,并持续检测是否有薄膜本体,如果未检测到薄膜本体则执行第十六步,若检测到则执行第十七步;这一步的作用在于检测薄膜本体有没有被用完,并给出相应结果的下一步。
40.第十六步;控制模块控制履带底盘、振动电机关闭,执行第五步;这一步的作用在于当薄膜本体被用完时控制履带底盘和振平机构停止工作。
41.第十七步;控制模块是否接收到通过无线信号接收模块传递的系统关闭信号,若未接收到则继续检测,若接收到关闭信号则执行下一步;这一步的作用在于检测工作人员有没有发出系统停止的信号。
42.第十八步;控制模块控制履带底盘、振动电机关闭,电热丝通电加热;这一步的作用在于停止装置,并准备裁断薄膜本体。
43.第十九步;控制模块控制第一电动气阀打开,控制电动伸缩杆伸出后收回,控制电热丝断电;这一步的作用在于裁断薄膜本体。
44.第二十步;控制模块控制第一电动气阀关闭,执行第二步流程。
45.综上所述,本发明包括以下至少一种有益技术效果:
46.1.通过采用上述技术方案,在现有覆膜机的原理基础上通过增加履带底盘、控制核心驱动机构实现了本装置的自动前进及自动停止,履带底盘对未完全固化的混凝土地面的压强相较于人对地面的压强来说小了许多,这样就减小了本装置对混凝土地面影响,使后面的振平机构更易实现对混凝土表面的收光,覆膜机构在控制核心的辅助下可自动实现由从薄膜辊筒上自动撕膜到将薄膜覆盖在混凝土表面以及后续剪断薄膜的一系列功能,振平机构可将履带底盘产生在混凝土上的印记自动振平,工作人员只需通过装有无线信号发射模块的无线遥控器即可实现对本装置的操控,进而实现对混凝土的覆膜,整个装置自动化程度相比现有方案有很明显的提高,在实现对混凝土进行覆膜的同时使整个装置对人需要执行的工作内容需求减小,提高了作业效率;
47.2.通过采用上述技术方案,设置了一个自动补充薄膜的机构,即送膜机构,送膜机
构增加了薄膜的供应量,使本装置一次可携带多卷薄膜,增加了装置的持续工作时间,同时通过采用电机带动转轮,为实现薄膜的自动补充功能提供了硬件基础,夹头机构的作用首先在于为薄膜辊筒提供稳定的支撑基础,其次便于工作人员对空辊筒进行更换;
48.3.通过采用上述技术方案,撕膜机构为装置实现自动将薄膜本体从薄膜辊筒上撕下的功能提供了部分硬件基础,其实现原理为当薄膜辊筒放置在第一连接带上之时,第二电机开始转动,第一吸气机构开始吸气,薄膜辊筒在第一连接带上滚动,薄膜本体的边缘于与第一连接带接触时,由于第一连接带表面密布有若干第一通孔,第一吸气机构通过第一通孔对第一连接带与薄膜辊筒接触地形成负压,这样会将薄膜本体从薄膜辊筒上撕下,与此同时第一连接带也随第一电机的旋转而不断旋转,因此就将薄膜本体成功撕下并向前传送,第一接近开关的作用在于检测薄膜本体在撕膜机构上的具体位置,为控制核心提供反馈信号。
附图说明
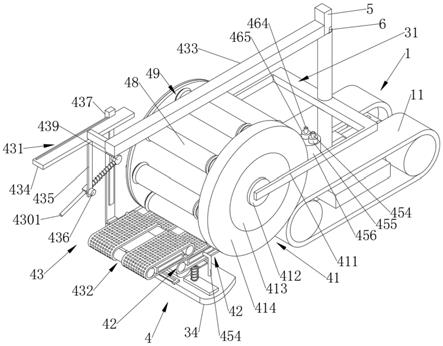
49.图1是本发明结构示意图。
50.图2是本发明的侧视图。
51.图3是图1的第二视角图。
52.图4是图3中a处的局部放大图。
53.图5是无线遥控器示意图。
54.图6是夹头机构示意图。
55.图7是覆膜机构示意图。
56.图8是传膜机构示意图。
57.图9是本系统控制流程图。
58.附图标记:1、驱动机构;11、履带底盘;12、控制核心;121、控制模块;122、无线信号接收模块;123、无线信号发射模块;2、支架;21、立杆;3、振平机构;31、第一横杆;32、第一竖杆;33、第一伸缩杆;34、振平板;35、第一压簧;36、振动电机;4、覆膜机构;41、送膜机构;411、第二横杆;412、第一电机;413、转轮;414、支撑盘;42、撕膜机构;421、撕膜架;422、第二伸缩杆;423、第三压簧;424、第二电机;425、第一驱动轮;426、第一从动轮;427、第一连接带;428、第一通孔;429、第一接近开关;43、铺膜机构;431、传膜机构;432、吸膜机构;4321、吸膜架;4322、第四电机;4323、第二驱动轮;4324、第二从动轮;4325、第二连接带;4326、第二通孔;4327、第二接近开关;433、第三横杆;434、第一滑杆;435、第二竖杆;436、第三电机;437、第二滑杆;438、第一滑块;439、铰接块;4301、第一连杆;4302、第二滑块;4303、第四压簧;44、裁膜机构;441、电动伸缩杆;442、电热架;443、电热丝;45、第一吸气机构;451、第一气箱;452、第一气盖;453、第一贯穿孔;454、第一气管;455、第一电动气阀;456、抽气泵;46、第二吸气机构;461、第二气箱;462、第二气盖;463、第二贯穿孔;464、第二气管;465、第二电动气阀;47、薄膜辊筒;48、薄膜本体;49、夹头机构;491、第二压簧;492、固定块;493、圆锥抵件;5、警示灯;6、蜂鸣器;7、无线遥控器。
具体实施方式
59.以下结合附图对本发明作进一步详细说明。
60.如图1和图2所示,为本发明所披露的一种夏季建筑施工用混凝土养护覆膜装置及使用方法,包括驱动机构1,驱动机构1包括履带底盘11、控制核心12,在现有覆膜机原理的基础上通过增加履带底盘11、控制核心12驱动机构1实现了本装置的自动前进及自动停止,履带底盘11作为一种非常成熟现有技术,在此便对其结构不进行赘述,具体可参考坦克、履带吊车、履带挖掘机的履带底盘11,同时削减掉一些本装置不需要的机构并做适当的缩小即可,同时可适当增加履带的宽度,以及采用较轻的材质作为履带本体,如橡胶或硬质塑料板,这样可以减小驱动机构1对混凝土地面的压强。
61.如图2和图3所示,履带底盘11上部分别固定连接有支架2和控制核心12,支架2包括立杆21,立杆21底部固定连接于履带底盘11,立杆21分别固定连接有振平机构3、覆膜机构4,立杆21将驱动机构1与后续的振平机构3和覆膜机构4相连接,使整个装置成为稳固的整体,振平机构3包括第一横杆31,第一横杆31一端固定连接于立杆21侧壁,第一横杆31另一端固定连接有第一竖杆32的一端。
62.如图2和图4所示,第一竖杆32另一端固定连接有第一伸缩杆33,第一伸缩杆33伸缩方向竖直,第一伸缩杆33底端固定连接有振平板34,第一伸缩杆33外侧套设有第一压簧35,第一压簧35一端抵接于振平板34,另一端抵接于第一竖杆32,振平板34上方固定连接有振动电机36,振平板34的作用在于将振动电机36产生的振动传递给混凝土地面,将混凝土表面抹光,第一伸缩杆33和第一压簧35共同组成减震与连接件,首先第一伸缩杆33将振平板34与第一竖杆32相连接,其次为第一压簧35提供限位,减小振动电机36产生的振动对机构整体的影响。覆膜机构4在控制核心12的辅助下可自动实现由从薄膜辊筒47上自动撕膜到将薄膜本体48覆盖在混凝土表面以及后续裁断薄膜本体48的一系列功能,振平机构3可将履带底盘11造成在混凝土上的印记自动振平,
63.如图2和图5所示,立杆21顶部固定连接有警示灯5、蜂鸣器6,警示灯5和蜂鸣器6的作用在于提醒工作人员装置遇到了需要人工处理的问题;控制核心12包括控制模块121和无线信号接收模块122,控制模块121包括微处理器模块为stc89c52系列处理器和一系列电磁继电器以及其它相应常用电子元件,无线信号接收模块122相匹配有无线信号发射模块123,无线信号发射模块123固定连接有无线遥控器7。工作人员只需通过装有无线信号发射模块123的无线遥控器7即可实现对本装置的操控,无线遥控器7可实现的功能包括但不限于控制系统启动或关闭,控制履带底盘11行进速度的改变以及履带底盘11的转向,进而实现对混凝土的覆膜,整个装置自动化程度相比现有方案有很明显的提高,在实现对混凝土进行覆膜的同时使整个装置对人的工作需求减小,提高了生产效率。
64.如图1和图2所示,覆膜机构4包括送膜机构41、撕膜机构42、铺膜机构43、裁膜机构44,覆膜机构4总体需要实现的功能是携带多卷薄膜辊筒47并将薄膜本体48从薄膜辊筒47上撕下并铺至混凝土表面,这一功能由送膜机构41、撕膜机构42、铺膜机构43、裁膜机构44这四个部分共同组合而实现,其中送膜机构41的功能是使本装置一次可携带多卷薄膜辊筒47并在一卷薄膜辊筒47上的薄膜本体48用完后自动更换新的薄膜辊筒47,增加了装置的持续工作时间,同时通过采用电机带动转轮413,为实现薄膜辊筒47的自动补充功能提供了硬件基础,送膜机构41包括第二横杆411,第二横杆411一端固定连接于立杆21侧壁,第二横杆411另一端固定连接有第一电机412,第一电机412输出端轴线水平,第一电机412输出端固定连接有转轮413的一端,转轮413另一端转动连接于第一横杆31,转轮413两端对称连接有
支撑盘414,支撑盘414周侧均布有若干夹头机构49,夹头机构49的作用首先在于为薄膜辊筒47提供稳定的支撑基础,其次便于工作人员对空辊筒进行更换。
65.如图6和图7所示,夹头机构49包括第二压簧491,第二压簧491一端固定连接于支撑盘414,第二压簧491沿水平方向伸缩,第二压簧491另一端固定连接有固定块492一端,固定块492另一端转动连接有圆锥抵件493,两个对称所述圆锥抵件493之间夹有薄膜辊筒47,薄膜辊筒47上绕设有薄膜本体48,其中一个薄膜辊筒47抵接于撕膜机构42的上表面,这样可使吸膜机构432顺利将薄膜本体48从薄膜辊筒47上吸下来。
66.如图4和图6所示,撕膜机构42包括撕膜架421,撕膜架421底部固定连接有两个平行设置的第二伸缩杆422,两个第二伸缩杆422下端固定连接于振平板34,第二伸缩杆422外部套设有第三压簧423,第三压簧423一端抵接于振平板34,另一端抵接于撕膜架421,第二伸缩杆422和第三压簧423的组合首先为撕膜架421提供了支撑,其次在送膜机构41转动时,如图2所示,由于其中一个外部绕设有薄膜本体48的薄膜辊筒47抵接于撕膜机构42的上表面,因此,在换新的薄膜辊筒47时被换下的薄膜辊筒47必然会迫使撕膜机构42向下移动,此时第二伸缩杆422与第三压簧423之间形成的机构便可在更换薄膜辊筒47时顺势下移,待更换完毕后恢复原位,第三个作用是减小振平机构的振动对撕膜机构42产生的影响。
67.如图4和图6所示,撕膜架421侧面一端固定连接有第二电机424,第二电机424轴线水平,第二电机424输出端固定连接有第一驱动轮425,撕膜架421侧面另一端转动连接有第一从动轮426,第一驱动轮425与第一从动轮426表面用两个平行设置的第一连接带427绕设,两条第一连接带427之间留有间隙,第一连接带427表面密布有若干第一通孔428,撕膜架421中部固定连接有第一吸气机构45,第一吸气机构45一侧抵接于第一连接带427上段内表面,第一吸气机构45远离所述薄膜辊筒47一侧固定连接有第一接近开关429,第一接近开关429在竖直方向上位于两条第一连接带427之间的间隙上,第二接近开关4327检测方向竖直向上。
68.如图2和图6所示,撕膜机构42为装置实现自动将薄膜本体48从薄膜辊筒47上撕下的功能提供了部分硬件基础,其实现原理为当薄膜辊筒47放置在第一连接带427上之时,第二电机424开始转动,第一吸气机构45开始吸气,薄膜辊筒47在第一连接带427上滚动,薄膜本体48的边缘于与第一连接带427接触时,由于第一连接带427表面密布有若干第一通孔428,第一吸气机构45通过第一通孔428对第一连接带427与薄膜辊筒47接触地形成负压,这样会将薄膜本体48从薄膜辊筒47上撕下,与此同时第一连接带427也随第一电机412的旋转而不断旋转,因此就将薄膜本体48成功撕下并向前传送,第一接近开关429的作用在于检测薄膜本体48在撕膜机构42上的具体位置,为控制核心12提供反馈信号。
69.如图2和图8所示,铺膜机构43包括传膜机构431与吸膜机构432,传膜机构431为本装置实现自动将薄膜本体48铺至混凝土地面提供了硬件基础,传膜机构431包括第三横杆433,第三横杆433一端固定连接于立杆21上端,另一端分别固定连接有第一滑杆434和第二竖杆435,第三横杆433的作用在于支撑传膜机构431的其它部件,使其正常运行,第二竖杆435下端固定连接有第三电机436,第一滑杆434滑动连接有第二滑杆437,第二滑杆437滑动方向水平,第二滑杆437滑动连接有第一滑块438,第一滑块438滑动方向竖直.
70.如图1和图8所示,第一滑块438上部铰接有铰接块439,铰接块439固定连接有第一连杆4301一端,第一连杆4301另一端滑动连接有第二滑块4302,第二滑块4302固定连接于
第三电机436,第一连杆4301外部套设有第四压簧4303,第四压簧4303一端抵接于铰接块439,另一端抵接于第二滑块4302,第二滑块4302底部固定连接有吸膜机构432。第一滑杆434、第二滑杆437、第二竖杆435和第三电机436等等其它传膜机构431部件共同实现的功能是将吸膜机构432从初始位置即常态位以一个直角的路径移动至混凝土地面,并且不使吸膜机构432与水平面的夹角改变,且在移动的过程中不会影响到其它机构的运动,同时可以顺利的将吸膜机构432从混凝土地面移动回至初始位置。
71.如图7和图8所示,吸膜机构432的作用就在于顺利将撕膜机构42撕下的薄膜吸至自身下表面,从而保证后续步骤的顺利实施,其机构组成是:吸膜机构432包括吸膜架4321,吸膜架4321固定连接于第二滑块4302下部,吸膜架4321下方一端固定连接有第四电机4322,第四电机4322输出端固定连接有第二驱动轮4323,吸膜架4321下方另一端转动连接有第二从动轮4324,第二从动轮4324外侧与第二驱动轮4323表面用两条平行设置的第二连接带4325连接,两条第二连接带4325之间留有间隙,第二连接带4325表面密布有若干第二通孔4326,吸膜架4321中部固定连接有第二吸气机构46,第二吸气机构46一侧抵接于第二连接带4325下段内表面,第二吸气机构46一侧固定连接有第二接近开关4327,第二接近开关4327在竖直方向上位于两条第二连接带4325之间的间隙上,第二接近开关4327检测方向竖直向下,吸膜机构432在初始位置时与撕膜机构42在竖直方向上部分重合,且吸膜机构432位于撕膜机构42竖直上方,即第一气盖452与第二气盖462在竖直方向上部分重合,只有这样才能为薄膜辊筒47在撕膜机构42上留出位置,同时吸膜机构432又可顺利将撕膜机构42撕下的薄膜吸至吸膜机构432下表面。
72.如图2和图7所示,其工作原理是第四电机4322带动第二驱动轮4323旋转,从而带动第二连接带4325旋转,第二吸气机构46在第四电机4322启动的同时也启动,当薄膜本体48经过第二吸气机构46的竖直下方时第二吸气机构46在薄膜本体48与第二连接带4325之间形成负压,将薄膜本体48紧紧吸在第二连接带4325表面,第二接近开关4327的作用在于检测薄膜本体48在吸膜机构432上的具体位置,为控制核心12提供反馈信号。
73.如图2和图7所示,第一吸气机构45包括第一气箱451,第一气箱451固定连接于撕膜架421,第一气箱451上方固定连接有第一气盖452,第一气盖452上开设有若干第一贯穿孔453,第一气盖452上表面与第一连接带427上段内表面相抵接,第一气箱451通过第一气管454连接有第一电动气阀455,第一电动气阀455连接有抽气泵456,抽气泵456固定连接于履带底盘11,第二吸气机构46包括第二气箱461,第二气箱461固定连接于吸膜架4321,第二气箱461下方固定连接有第二气盖462,第二气盖462下表面与第二连接带4325下段内表面相抵接,第二气盖462上开设有若干第二贯穿孔463,第二气箱461通过第二气管464连接有第二电动气阀465,第二电动气阀465连接于抽气泵456,第一气管454与第二气管464均只在图中画出部分以指示其位置,并以断面线做出示意。
74.如图3和图7所示,这样的结构设置实现了撕膜机构42与吸膜机构432对于第一吸气机构45与第二吸气机构46的功能要求,第一吸气机构45中的第一气盖452上开设有若干第一贯穿孔453,这些第一贯穿孔453与第一连接带427上的第一通孔428形成动态气孔通道,使第一吸气机构45能在第一连接带427上段外表面形成负压,从而成功将薄膜本体48从薄膜辊筒47上撕下,第一贯穿孔453的孔径大于第一通孔428,这样设置的原因是在其它条件不变的情况下如此设置可以增加第一通孔428上表面的吸力,产生更大的负压。第二吸气
机构46结构与第一吸气机构45的结构相似,原理也大致相同,二者分别通过第一电动气阀455、第二电动气阀465与抽气泵456相连接,这样就可以通过控制第一电动气阀455、第二电动气阀465的开闭来实现对第一吸气机构45,第二吸气机构46的控制,且二者共用一个抽气泵456,减小了抽气泵456的使用数量,降低了生产成本。
75.如图4和图7所示,裁膜机构44包括电动伸缩杆441,电动伸缩杆441伸缩方向水平,电动伸缩杆441一端固定连接于撕膜架421,另一端固定连接有电热架442,电热架442固定连接有电热丝443,电热丝443水平设置。裁膜机构44为装置实现自动割断薄膜本体48提供了硬件基础,这样就可以代替人工实现割断薄膜本体48这一动作,其工作原理是控制模块121控制电热丝443通电升温,电动伸缩杆441推动电热架442向前进,电热丝443触碰到薄膜本体48时用高温将其熔断,电热架442为电热丝443提供支撑基础。
76.如图1和图4所示,控制模块121分别电连接有振动电机36,第一电机412,如图2和图7所示,控制模块121分别电连接有第二电机424、第三电机436、第四电机4322、第一电动气阀455、抽气泵456、第二电动气阀465、电动伸缩杆441、电热丝443、第一接近开关429、第二接近开关4327。通过将控制模块121与各个电动器件用电路相连接,使控制模块121可以顺利控制各个电动器件,从而顺利实现整体功能。
77.本发明的控制系统运行流程为:
78.第一步:人工手动启动系统电源;
79.第二步;控制模块121是否接收到通过无线信号接收模块122传递的系统启动信号,如果有执行第三步,若没有则继续执行第二步。这一步的设置是为了不使装置在工作人员启动电源后装置立即运动起来从而产生意外伤到工作人员。
80.第三步;控制模块121同时启动第二电机424、第一电动气阀455、第一接近开关429;这时撕膜机构42、第一吸气机构45开始工作。
81.第四步;第一接近开关429持续检测,检测薄膜本体48是否存在,若未检测到薄膜本体48则执行第五步,若检测到薄膜本体48存在则执行第八步;这一步的目的在于检测撕膜机构42有没有将薄膜本体48成功撕下来,并根据其可能出现的两种情况做出后续解决方案。
82.第五步;控制模块121控制第一电机412转动一个固定角度,此角度为三百六十度除以支撑盘414上最多可夹持的薄膜辊筒47的数量,例如支撑盘414上最多可放置六个薄膜辊筒47则此角度为六十度,以此类推;这一步的作用在于当薄膜辊筒47上的薄膜本体48被用完时送膜机构41进行转动,更换新的薄膜辊筒47,
83.第六步;控制模块121检测第一电机412累计旋转角度是否大于或等于三百六十度,若第一电机412累计旋转角度小于三百六十度则执行第四步程序,若第一电机412累计旋转角度大于或等于三百六十度则执行第七步,(注:每次本系统电源启动后第一电机412角度计数清零);这一步的作用在于判断转轮413上所有的薄膜辊筒47上的薄膜本体48是否均已被用完,当第一电机412在系统启动后已转过三百六十度时,说明转轮413上所有薄膜辊筒47上的薄膜本体48均已被用完,此时便需要停机更换新的薄膜辊筒47了。
84.第七步;控制模块121启动警示灯5、蜂鸣器6,同时关闭第二电机424、第一电动气阀455,之后需由工作人员手动关闭系统电源;这一步的作用便是停机并且提醒工作人员更换新的薄膜辊筒47了。
85.第八步;控制模块121同时关闭第二电机424、第一接近开关429;这一步的作用在于使薄膜本体48不再继续向前移动,而是使其稳定停在当下的位置。
86.第九步;控制模块121同时启动第二电动气阀465、第四电机4322;这一步的作用在于启动吸膜机构432。
87.第十步;控制模块121启动第二接近开关4327,第二接近开关4327不间断检测薄膜本体48是否出现在指定位置,若薄膜本体48未出现则继续检测,若薄膜出现则执行下一步;这一步的作用在于检测薄膜本体48是否到达时指定位置。
88.第十一步;控制模块121控制第三电机436转动一个固定角度;这一步的作用在于将被吸附在吸膜机构432下表面的薄膜移动至混凝土表面。
89.第十二步;控制模块121控制第二电动气阀465关闭;这一步的作用在于使吸膜机构432不再吸住薄膜本体48,使薄膜本体48可以顺利贴在混凝土表面。
90.第十三步;控制模块121控制第一电动气阀455关闭,控制履带底盘11、振动电机36启动;这一步的作用在于使装置开始启动起来。
91.第十四步;控制模块121控制第三电机436旋转回初始位置,控制第四电机4322、第二接近开关4327关闭;这一步的作用在于使送膜机构41回复原位。
92.第十五步;控制模块121控制第一接近开关429打开,并持续检测是否有薄膜本体48,如果未检测到薄膜本体48则执行第十六步,若检测到则执行第十七步;这一步的作用在于检测薄膜本体48有没有被用完,并给出相应结果的下一步。
93.第十六步;控制模块121控制履带底盘11、振动电机36关闭,执行第五步;这一步的作用在于当薄膜本体48被用完时控制履带底盘11和振平机构3停止工作。
94.第十七步;控制模块121是否接收到通过无线信号接收模块122传递的系统关闭信号,若未接收到则继续检测,若接收到关闭信号则执行下一步;这一步的作用在于检测工作人员有没有发出系统停止的信号。
95.第十八步;控制模块121控制履带底盘11、振动电机36关闭,电热丝443通电加热;这一步的作用在于停止装置,并准备切断薄膜本体48。
96.第十九步;控制模块121控制第一电动气阀455打开,控制电动伸缩杆441伸出后收回,控制电热丝443断电;这一步的作用在于切断薄膜本体48。
97.第二十步;控制模块121控制第一电动气阀455关闭,执行第二步流程。
98.此外,无线遥控器7可单独通过向控制模块121发送信号控制履带底盘11的启动、停止与转向以此实现装置在遇到有临时障碍物需要停止移动时工作人员可以自由控制装置的启停,但薄膜本体48不被切断的效果,增加了装置的实用性。
99.本实施例的实施原理为:在使用本装置时首先将本装置放置在指定位置,其次工作人员需要将所有的薄膜辊筒47更换为新的,并拆开外包装使所有的薄膜辊筒47方向相同,开启系统电源,之后工作人员退离装置,用无线遥控器7控制装置启动,装置启动后会自主执行将薄膜本体48从薄膜辊筒47上撕下,并将其覆盖在混凝土表面,之后在一卷薄膜辊筒47用完之后自动更换新的薄膜辊筒47,在所有新的薄膜辊筒47用完后装置会停下并提醒工作人员进行更换,而工作人员只需要通过无线遥控器7即可控制本装置进行各种相应的工作。
100.本方案权利要求书以及说明书关于流程的部分若未明确指出下一步流程的指向,
则默认为执行与本步骤相邻的下一步流程。
101.本方案权利要求书以及说明书中所阐述的“同时”是指多个步骤在同一时间点同时执行或在较短的时间间隔内依次执行。
102.本具体实施方式的实施例均为本发明的较佳实施例,并非依此限制本发明的保护范围,故:凡依本发明的结构、形状、原理所做的等效变化,均应涵盖于本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1