本发明涉及山兰稻识别,尤其涉及一种基于光学和雷达影像的山兰稻产区空间分布信息提取方法。
背景技术:
1、山兰稻作为海南黎族特有的一种山地旱稻,是黎族人在长期生产实践中保留下来的宝贵财富,受自然条件、农业发展状况以及城镇化的影响,山兰稻的空间分布变化十分剧烈。因此,对山兰稻时空分布及变化的研究,具有重要的意义。随着遥感技术的不断进步和广泛应用,它在空间动态监测方面的应用得到了显著提高。相较于传统的作物监测方法,遥感技术具有耗时短、效率高、监测范围广、以及高时间连续性重复性等独特优势,但对于大多数热带和亚热带地区而言,获取足够数量的山兰稻关键期影像是十分困难的。
2、光学和雷达影像的影像数据成像不受气象干扰,能敏锐地响应山兰稻植株发育和土壤水分变化,是多云雾地区山兰稻生长监测的重要数据源。虽然现有分类方案能够获得较高的山兰稻分类精度,但由于光学和雷达影像的影像数据本身噪点过多的问题,依然存在提取精度上的不足。
技术实现思路
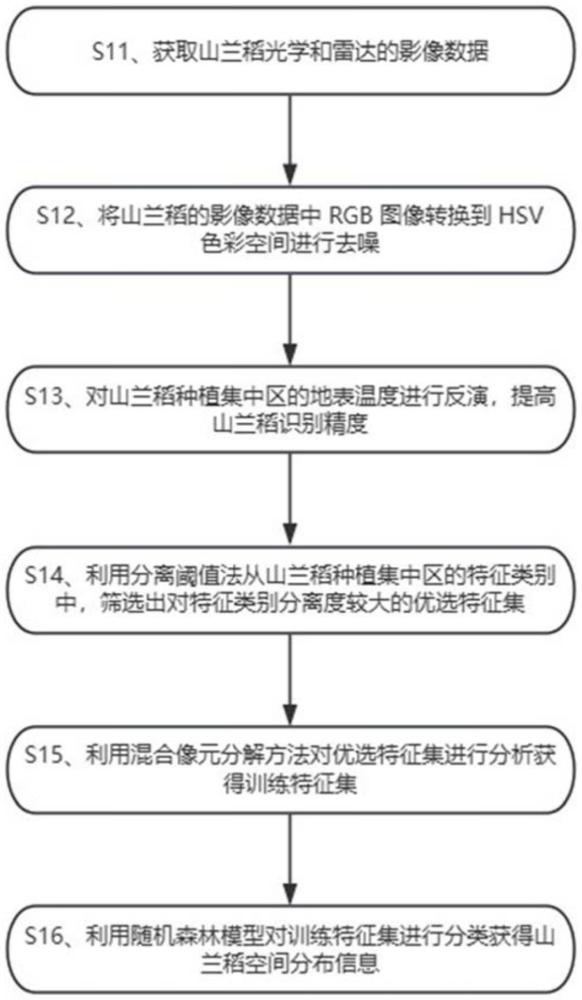
1、本发明为了克服低山丘陵区等结构复杂种植区的山兰稻面积提取精度低的问题,提供了一种基于光学和雷达影像的山兰稻产区空间分布信息提取方法,包括以下步骤:
2、s11、在gee(google earth engine)平台进行云掩膜处理,设置云量小于预设云量阈值的影像进行合成,获取山兰稻光学和雷达的影像数据;
3、s12、将步骤s11获取的影像数据中的rgb图像转换到hsv色彩空间,利用单个像素8维空间向量信息形成一种多边形像素集合体,并基于此多边形像素集合体对山兰稻的影像数据进行去噪,保留山兰稻的边缘细节特点;
4、s13、地表温度反演,采用普适性单通道算法对步骤s12经去噪后山兰稻种植集中区的地表温度进行反演,得提高山兰稻识别精度;
5、s14、提取步骤s13中山兰稻种植集中区的特征类别,所述特征类别包括光谱波段、植被指数、水体指数及地形与纹理特征,再利用分离阈值法筛选出对特征类别分离度大于预设分离度阈值的山兰稻种植集中区的优选特征集;
6、s15、利用完全约束的最小二乘混合像元分解方法,对步骤s14中优选特征集进行分析,获得易与山兰稻产生光谱混淆的地类的丰度图,并作为训练特征集融入分类体系;
7、s16、构建随机森林模型,对步骤s15稻训练特征集进行分类,获得山兰稻空间分布信息。
8、进一步的,步骤s12中,所述利用单个像素8维空间向量信息形成一种多边形像素集合体包括以下步骤:
9、s21、将单个像素8维空间向量表示为(u,v,h,s,l,r,g,b),用于表达山兰稻的影像数据的像素点,其中(u,v)代表空间位置向量,(h,s,l)为hsv色彩特征,(r,g,b)为rgb色彩特征,基于(h,s,l,r,g,b)色彩特征,进行局部中心种子点数量n的计算;
10、s22、由s21计算获得聚类中心的个数为山兰稻影像数据像素点的局部中心个数n,取多边形像素集合体边个数,计算集合体标准间距;
11、s23、以聚类中心点为局部中心,搜索附近两倍标准距离范围内所有像素点与聚类中心之间的色彩特征距离和空间距离,更新像素点标签信息;
12、s24、开始对每一个像素点进行迭代计算,反复迭代后,当每个聚类中心与其周围的中心前后两次距离误差收敛于0.1时,迭代终止,确定多边形像素集合体。
13、进一步的,步骤s12中,所述基于多边形像素集合体对山兰稻的影像数据进行去噪,包括以下步骤:
14、s31、设置搜索框φi和固定尺寸的相似框,搜索框包含多个多边形像素集合体;
15、s32、遍历多边形像素集合体,对其中心像素j与待处理像素i进行比较,对i和j进行所有像素的相似性比较,从而获得像素点j的权重wij;
16、s33、最后对搜索框内所有多边形像素集合体进行加权平均,得到去噪后图像在i点的像素估计值
17、s34、输出去噪后的山兰稻的影像数据。
18、进一步的,步骤s14中,所述分离阈值法进行筛选获得优选特征集的方法为:
19、s41、用seath的j-m(jeffries-matusita)距离判断特征类别的可分离性,其值范围为[0,2],其值接近0,代表2个类别在某一特征上几乎无差异;其值为2,代表2个类别在某一特征上能够完全区分开;
20、s42、结合野外调查数据与山兰稻种植集中区影像数据辅助进行目视解译;
21、s43、计算特征类别的分离度,保留分离度最大的2个特征类别,包括重复特征类别,获得山兰稻种植集中区的优选特征集。
22、进一步的,步骤s15中,所述对山兰稻种植集中区数据集进行分析步骤为:
23、s51、将山兰稻种植集中区的优选特征集作为输入数据集,通过最小噪声分离对特征变量进行主成分分析来实现数据降维并估计影像噪声点;
24、s52、根据影像噪声计算纯净像元指数;
25、s53、利用n维可视化工具挑选各地类的纯净像元;
26、s54、基于完全约束最小二乘混合像元分解得到山兰稻、其他作物以及蔬菜的植被丰度图;
27、s55、以植被丰度图作为辅助,将易发生光谱混淆的地类进行区分。
28、进一步的,步骤s16中,随机森林模型构建步骤为:
29、s61、采用基尼指数进行节点分裂时的特征选择,所述基尼指数表示样本集合中随机样本被错分的概率,构建集合d的基尼指数gini(d)表达式为:
30、
31、式中,k为训练样本中的种类数;为集合d中随机选取的样本属于类别k的概率;
32、s62、若集合d根据特征a是否取某一值α被分为d1和d2两部分,则在特征a的条件下,集合d的基尼指数gini(d,a)表达式为:
33、
34、其中,|d|表示集合d中的样本数,|d1|表示集合d1中的样本数,|d2|表示集合d2中的样本数;
35、s63、采用平均不纯度减少的方法评估训练特征集重要性,其表达式为:
36、
37、其中,ntree为随机森林模型中决策树个数;ginit(d)、ginit(d,a)分别为第t棵决策树经特征a划分前后集合d的基尼指数。
38、进一步的,s43步骤中,所述采用平均不纯度减少的方法评估训练特征集重要性的步骤为:
39、s71、采用平均不纯度减少的方法计算随机森林模型中训练特征集中各特征的重要性,并按照从高到低的顺序进行排序;
40、s72、在根据各特征的重要性进行排序时,第1次选择首位特征,第2次选择前2位特征,依次类推可得到单时相20个不同特征组合、时序影像100个不同特征组合的随机森林模型;
41、s73、分别计算其袋外oob(out of bag)数据,对随机森林模型精度和复杂度综合考虑后确定最优特征组合,从而在保证分类精度的条件下降低模型复杂度。
42、进一步的,步骤s16中,所述提取山兰稻空间分布信息方法为:
43、s81、采用随机森林模型通过自助法(bootstrap)从训练特征集中有放回地随机选取n个样本作为训练样本;
44、s82、经ntrte次样本抽取和训练可得到ntree个决策树模型;
45、s83、在每棵决策树的每个节点处随机选取mtry个特征并进行内部节点划分;
46、s84、对所有决策树模型结果进行集成,采用多数投票方式决定最终山兰稻空间分布信息的分类结果。
47、本发明的有益效果如下:
48、本发明涉及一种基于光学和雷达影像的山兰稻产区空间分布信息提取方法,首先在gee平台获取山兰稻光学和雷达影像的影像数据,能够及时准确地获取山兰稻种植面积和长势信息;将山兰稻影像数据中的rgb图像转换到hsv色彩空间进行去噪,很好地保留山兰稻的边缘细节特点,利于提高反演精度,为后续山兰稻的提取分类提供基础,进而提高山兰稻空间分布信息提取的精度;其次使用普适性单通道算法对去噪后山兰稻种植集中区的地表温度进行反演,进一步提高山兰稻识别精度;最后使用最小二乘混合像元分解方法和随机森林模型进行分类得到山兰稻空间分布信息。本发明在进行山兰稻提取分类前先对图像进行去噪处理,提高图像识别精度,进而提高了山兰稻空间分布信息提取的精度。