用于具有非线性总功率特性曲线的飞轮质量存储器的双马达单元的制作方法
1.本发明涉及一种用于飞轮质量存储器的双马达单元,该双马达单元具有至少两个耦联到一个共同的旋转体上的电机,所述电机分别具有彼此不同的功率特性曲线。
背景技术:
2.在本技术的范围内,电机在此可以仅理解为电机本身,也就是说转子、具有绕组的定子和直接所属的机械部件,或者但也可以理解为转子、具有绕组的定子连同所述所属的机械部件加上变频器、控制单元和必要时其它对于电机的功能所需的部件。
3.典型地,具有功率p的电机具有在转速ω上近似恒定的转矩m,由此引起功率p与转速ω的线性相关性,使得适用关系p=m*ω。在许多应用中并且也在将电机在飞轮质量存储器中使用时,现在在连续的运行中、也就是说在所述应用的工作范围内要求恒定的功率p
lin
。同时,可用作工作范围的转速带、运行转速范围ω应尽可能宽,恒定的功率因此可在尽可能大的运行转速范围上被调用。
4.因此,所述电机必须具有力矩或者说力矩特征,所述力矩特征在连续的运行中已经在最小转速ω
min
的情况下能够实现在相应的应用中所要求的恒定功率p
lin
。结果是电机因此在产生更高转速的恒定功率p
lin
的情况下、例如在最大转速ω
max
的情况下明显尺寸过大设计,并且在更高转速的情况下最大可能的功率在如下运行中不被使用,在该运行中在工作范围内仅要求恒定的功率。因此,电机和其它部件如逆变器或变频器、电缆等都尺寸过大设计。
5.迄今为止,已知对付所述问题的各种可能性。因此,例如可以—如已经示出的那样—在运行转速范围的较高转速范围内限制用于电机的电流。这导致电机和变流器的有效功率未被完全充分利用,并且相应地为了在运行转速范围的下部范围内获得所希望的运行功率需要相应部件、如变频器/变流器的尺寸过大设计。
6.另一种可能性是电机在场削弱中运行。通过削弱电机中的场可以实现近似恒定的功率特性曲线,然而在变流器中产生高的开关损耗,所述开关损耗恰好在空转中在高转速时可能是临界的。但恰好在高转速时的空转在飞轮质量存储器的运行中经常出现。
7.另一种可能性是,通过特定的拓扑效应将电机设计为恒定功率。因此,在特殊的应用情况下,例如通过利用在高转速和特定的机器拓扑结构如同步磁阻的情况下由结构决定的转子气隙的扩张可以实现近似恒定的功率特性。这种方案的缺点是大量不同的系统部件的极其复杂的配合作用,这种配合作用难以控制。相应地,所述方案限于几个非常特定的应用。
8.由汽车领域,例如由de102011117853a1和de10160481a1已知利用动力传动系中的两个电机来解决所述问题的方案,所述电机通过变速器根据驱动装置的运行点来切换。
9.至于两个电机在一个装置中的连接,这样根据该原因也由机器制造已知:例如,外部激励的直流电机可以装备有附加的励磁机或励磁绕组。在与电网耦合的同步电机中也已
知在相同的轴上使用第二电机用于使同步电机加速。在此,第二电机仅带来起动功率,所述起动功率相比于在连续的运行中的运行功率是可忽略的。也已知在一个轴上使用两个电机,其中一个电机设计为驱动装置,并且另一个电机设计为发电机,以便因此实现有效的功能分配。
10.在用于通过旋转的飞轮质量来存储电能的飞轮质量存储器的区域中,在可导出的冷却功率、结构空间、功率电缆的引导和许多更多方面存在许多限制的框架条件,这些限制或也排除了所描述的方法的使用。这种飞轮质量存储器例如可以用于稳定供电网电压。在此,电能能够以可变的量(动态地)超过至少数秒存储和调用。通常,它们具有大于0.03kwh的存储容量。在此,每个子存储单元的具有在例如0.5kwh至200kwh范围内的单个存储容量的可单独安装的子存储单元可以是存储单元的一部分。相应地,在本公开内容的范围内,飞轮质量存储器通常是在相同位置处装载和卸载(而不在它们之间移动)的静止的飞轮质量存储器。这种飞轮质量存储器例如可以用于稳定供应网络或者用于中间存储电能,所述电能随后可以(优选以大的电流强度)被提供给消耗器,例如电动车辆。
技术实现要素:
11.因此,本发明的任务在于,如下地改进已知的飞轮质量存储器,使得该飞轮质量存储器能够在尽可能大的运行转速范围内以改善的效率接收和输出恒定的功率。
12.该任务通过独立权利要求的主题来解决。有利的实施形式由从属权利要求、说明书和附图得出。
13.一方面涉及一种用于飞轮质量存储器的双马达单元,该双马达单元具有至少两个耦联到一个共同的旋转体上的电机。在此,飞轮质量存储器的飞轮质量可以是旋转体的一部分,或者旋转体也可以是飞轮质量或飞轮质量的一部分。所述旋转体也可以是或者包括驱动轴、尤其是空心轴。旋转体优选构造用于在抽真空的空间中运行并且例如具有磁体支承装置的部件。所述电机可以是内置的电机(“外转子”)或外置的电机(“内转子”)。在外转子的情况下,实施为空心轴的驱动轴是特别有利的,该驱动轴因此与电机的转子耦联。电机分别具有定子和所属的、耦联到旋转体上的转子。在此,电机也可以具有共同的定子和/或共同的转子,这减少了所需构件的数量。这例如可以借助用于定子和/或转子的专用的缠绕样式实现。电机的相应的各个转子或共同的转子可以集成到旋转体中、即尤其是在轴向方向上彼此重叠地和/或与旋转体重叠地设置在驱动轴上。通过经由共同的旋转体耦联,电机(和共同的旋转体)的转速在双马达单元的每个运行点中线性地彼此相关、尤其是相等,所述运行点在下文中为了与相应的电机的单个运行点区分而被称为总运行点。相应地,不同的电机(如下面还将阐述的那样)能够设置或安置在相同的(驱动)轴上。优选地,不同的电机在此在按照规定的使用中不能机械地彼此脱耦,在不同的电机之间因此不存在耦联器或类似物。
14.在此,电机分别具有彼此不同的功率特性曲线,其根据转速ω来描述相应的电机的最大功率p。功率特性曲线因此也可以被称为与转速相关的功率特性曲线。因此,功率特性曲线说明对于确定的转速在电机的最大电流的情况下可达到的相应的最大功率。在此,所述功率特性曲线根据已知的关系对应于电机的相应的力矩特征,从而电机也具有彼此不同的力矩特征。不同的功率特性曲线在此由相应的电机的定子和/或转子的特定的设计方
案、即电机的硬件以及由相应的控制方案(相应的电机利用其运行)产生。这种控制方案例如可以以软件的形式存储在属于电机的控制单元上。
15.相应地,电机的不同功率特性曲线例如可以在硬件侧通过电机的所选择的拓扑结构来预先给定并且也可以在软件侧通过双马达单元的控制单元来预先给定。结构上的设计方案(“硬件”)例如可能导致电机具有随转速线性上升直至最大转速的功率,亦或在预先给定的极限转速、例如在最大转速一半时进入场削弱。
16.不同的功率特性曲线的通过软件预先给定的部分能够相应地尤其是也可变地预先给定。例如,极限转速ωf(相应的电机低于该极限转速不在场削弱中运行并且电机高于该极限转速在场削弱中运行)能够通过控制单元(在由结构决定地对于电机给定的极限内)移动。在这种控制单元中,也可以例如以表格或模型的形式存储双马达单元的电机中的哪个在给定的转速的情况下在哪种功率下具有哪种效率或哪些损耗。
17.在此,双马达单元构造为,在预先给定的运行转速范围内、也就是说在以所述运行转速范围为特征的连续运行中,通过(优选不同的)电机的相互作用产生可设定的总运行功率。在此,“可设定”在所述双马达单元的范围内也可以理解为“可调节的”或“可控制的”。在此,双马达单元的连续运行与双马达单元的起动运行不同,在连续运行中双马达单元和配属的飞轮质量存储器满足其按照规定的用途。相应地,所述运行转速范围是这样的转速范围,在该转速范围内双马达单元实现在按照规定的使用中所设置的用途。因此,不同的电机可以被称为所谓的“调节的”电机。
18.电机的相互作用在此对应于电机在旋转体上的共同作用,所述共同作用在双马达单元的至少一个总运行点中实现。电机的共同作用因此超过运行转速范围的一部分或多部分或超过整个运行转速范围连续地实现。
19.在此,总运行功率通过由电机的不同功率特性曲线得出的总功率特性曲线来预先给定,并且总功率特性曲线非线性地取决于共同的旋转体的转速。缩短地,非线性地取决于共同的旋转体的转速的总功率特性曲线能够称作为“非线性的总功率特性曲线”。相应地,在双马达单元的总运行点中的总运行功率由在电机的相应运行点中的功率之和得出。运行点可以针对电机例如通过电机的转速和功率来确定,必要时也通过其它运行参数,例如拓扑结构特有的参数和/或描述相应电机的场削弱的参数来确定。
20.优选地,在此双马达单元的全部电机设计成,使得其始终以相同的功能运行,也就是说全部作为旋转体的驱动装置或全部作为旋转体上的发电机。第一和第二转子也以有利的方式位于共同的旋转体上、尤其是共同的(空心)驱动轴上。
21.将两个电机耦联在共同的旋转体(尤其是轴)上具有如下优点:能够更好地利用可供使用的结构空间,并且也更好地利用用于功率电缆的冷却能力和空间。使用两个具有彼此不同的功率特性曲线或不同的力矩特征的电机能够实现非线性的总功率特性曲线。由此,可以减小或完全避免在运行转速范围的较高转速范围内限制电流。因此,变频器和功率引导的部件如线缆、插头和馈通件可以在运行转速范围内连续地接近相应的设计极限运行,这又降低了电损耗和所需的结构空间和冷却能力。因为各个电机也可以被单独控制,所以在此在宽的转速范围上实现大的灵活性。
22.所述两个电机的逆变器或变频器有利地明确地与相应运行的机器的运行方式相协调,这导致功率部件的高利用率。因此,不同的电机优选具有不同的逆变器,该逆变器因
此明确地与相应运行的电机的运行方式和拓扑结构匹配。
23.在一个有利的实施形式中规定,相应的通过电机(在至少一个、对于两个电机而言相同的转速的情况下)可产生的最大功率的差小于(在相应的转速的情况下)更强或最强电机的最大功率的70%、尤其是50%、优选10%。在此,在不同的转速下,不同的电机可以是相应较强的或最强的电机。例如,一个电机(a)在转速(1)时可以比另一个电机(b)更强,在另一转速(2)时两个电机同样强,而在又一转速(3)时另一个电机(b)比所述一个电机(a)更强。最大功率的在上面段落中量化的比例优选适用于运行转速范围的至少一个转速(即一个或多个转速),特别优选适用于整个运行转速范围。替代地,这也能够适用于双马达单元的并且因此电机的全部转速。因此,不同电机的最大功率优选处于相同的数量级。
24.这具有的优点是,在电机的相互作用中实现了特别大的灵活性,因为不同于例如第二电机仅产生起动功率并且因此不能显著地对运行功率做出贡献的解决方案,在当前情况中可以实现在不同电机的参与中具有大的可变性的所期望的总运行功率。例如,应产生大部分所期望的总运行功率的电机可以自由选择。因此,例如在90kw的总运行功率中通过第一电机产生50kw并且通过第二电机产生40kw的总运行功率中,然而在110kw的总功率中通过第一电机产生50kw并且通过第二电机产生60kw,双马达单元的主功率因此可以通过不同的电机产生,例如对应于对于功率和转速的不同组合而言电机的存储在控制单元中的损耗。这里,双马达单元的效率也被提高。
25.在实现相同优点的情况下也可以规定,在产生运行功率时并且因此在至少一个相同的转速下,电机的效率的差小于10%、尤其是小于5%、优选小于2%。所述效率的在此量化的比例优选适用于运行转速范围的至少一个转速(即一个或多个转速),特别优选适用于整个运行转速范围,或也适用于所有转速。因此有利地,相应电机的效率在产生运行功率时处于相同数量级。在此所描述的双马达单元由此也与作为用于与电网耦合的同步电机的起动辅助装置的第二电机的已知的应用不同。
26.在另一个有利的实施形式中规定,所述运行转速范围通过大于零的最小转速、例如2000、10000或30000转/分钟和大于最小转速的最大转速来预先给定。在此,运行转速范围有利地包括双马达单元的总转速范围的多于30%、尤其是多于50%。在此,双马达单元的总转速范围可以通过双马达单元的最大功率来预先给定或限定。这具有的优点是,非线性的总功率特性曲线已经在低转速的情况下且超过大的工作范围(运行转速范围)实现并且因此在所述范围内效率被提高。
27.在另一个特别有利的实施形式中规定,所述双马达单元构造成,通过分别单独地预先给定电机的相应运行点来设定所调节的总运行功率,也就是分别相互独立地设定电机的功率。这适用于运行转速范围的至少一个转速、即一个、多个或所有转速。在运行转速范围的至少一个转速时、优选在运行转速范围的转速中断范围时运行点的设定在此包括设定确定力矩的电流(其也可被称为q电流)和/或确定场的电流(其可被称为d电流)。尤其是,在所述一个或多个转速的情况下的运行点的设定也可以包括电机的拓扑结构特有的参数的设定。
28.由此例如可以通过合适地选择相应的电流使所述电机中的仅一个在场削弱中运行,或者两个电机同时在场削弱中运行,这然后可以根据电机的设计方案导致所期望的总运行功率。不同的电机因此可以不仅对称地、即例如两者或全部在场削弱中或全部在没有
场削弱的情况下被调节,而且也可以是不对称的、即例如没有场削弱的电机和电机在场削弱中。
29.由此,双马达单元能够进一步在效率上提高,因为根据运行点、即例如转速,一个电机能够比另一个电机更有效地运行,并且因此能够如下面还将描述的那样优化总效率。这在下面的表格中示例性地示出:
[0030][0031]
在该示例中,不像通常那样通过分别产生第一和第二机器的最大功率的90%作为相应的运行功率来设定162kw的额定总运行功率,所述额定总运行功率在这里对应于双马达单元的最大功率的90%。更确切地说,例如通过将第一电机的运行功率设定到其最大功率的100%上并且将第二电机的运行功率设定到其最大功率的77.5%上产生相同的162kw的额定总运行功率,然而同时在不同的电机上优化地、不均匀地划分待产生的总运行功率。这例如可以基于存储在控制单元中的表格来实现,该表格针对相应的运行点存储有各个电机的相应的效率,从而控制单元在此可选择具有最大效率的各个运行点的组合。
[0032]
相应地在此可以规定,所述双马达单元构造成,这样设定不同电机的相应的运行点,使得在电机中的电损耗之和在所设定的或所要求的总运行功率的情况下是最小的。这尤其是适用于运行转速范围的至少一个转速、即一个、多个或所有转速。在此,双马达单元的总效率被最大化,其方式为单个电机的效率或出现的损耗彼此相对平衡。由此,当效率通过提高其它电机的效率得到补偿时,例如可以有意识地忍受效率的恶化。在上面提到的示例中,因此例如第二机器的效率在待产生的运行功率减小到最大功率的77.5%时可以减小较小的第一量,然而这通过提高第一电机的效率在待产生的功率从90%提高到100%补偿了多于较大的第二量。
[0033]
在一个特别有利的实施形式中规定,所述电机包括至少一个永久励磁同步电机和/或至少一个同步磁阻电机和/或至少一个异步电机,尤其是两个永久励磁同步电机或一个永久励磁同步电机与同步磁阻电机组合,或者永久励磁同步电机与异步电机组合,或者同步磁阻电机与异步电机组合。所述电机也可以包括两个异步电机或两个同步磁阻电机。替代地或补充地,所述电机也可以包括一个或多个电机,它们不包括在所述的规格中。优选地,所述电机在此这样组合,使得在运行转速范围的最大转速时出现尽可能小的拖拽损耗。所述电机因此可以具有相同的或彼此不同的拓扑结构并且因此相应地基于相同的或彼此不同的功能原理。在此,所列举的可能性已经证实在飞轮质量存储器的区域中是特别有利的。
[0034]
在另一个有利的实施形式中规定,所述电机的功率特性曲线这样预先给定,尤其是也利用控制单元中的相应软件这样预先给定或可修改地预先给定,使得在运行转速范围内根据总功率特性曲线得到基本上恒定或恒定的最大功率。在此,在运行转速范围内与在运行转速范围内的总功率特性曲线的最大值偏差小于35%、尤其是小于25%、优选小于15%的功率可被视为基本上恒定的。这具有的优点是,借助电机的设计的已知的工具在电
机的相互作用下总体上可以为双马达单元提供具有最小化损耗的双马达单元,该双马达单元在预先给定的应用范围内产生尽可能恒定的功率。
[0035]
在另一个有利的实施形式中规定,至少一个、即一个、多个或者所有电机这样设计,使得其转矩在预先给定的转速范围内随着转速的升高而单调下降。尤其是,预先给定的转速范围可以是运行转速范围的部分范围或包括运行转速范围的部分范围。所述部分范围可以包括至少30%、至少60%或至少90%的运行转速范围。在此,所述部分范围可以连接到运行转速范围的上限上或包括上限。尤其是,所述转矩在运行转速范围内在部分范围与运行转速范围的下限之间可以具有最大值,转矩从该最大值起下降。在所述最大值下,转矩可以随转速增加。替代地,预先给定的转速范围还可包括整个运行转速范围。这具有的优点是,在总功率特性曲线中在宽的运行范围上可以近似达到稳定水平并且由此达到恒定的功率。
[0036]
在另一个有利的实施形式中规定,至少一个电机这样设计,使得其转矩随着转速的升高至少基本上是恒定的或恒定的。这尤其是至少在运行转速范围内适用。“基本上恒定的”在此可以理解为恒定的,直至预先给定的偏差,所述偏差例如可以为35%、25%或15%。这具有的优点是,在总功率特性曲线中在宽的运行范围上可以近似达到稳定水平并且由此达到恒定的功率。
[0037]
在另一个有利的实施形式中规定,根据总功率特性曲线,在低于运行转速范围的最大转速的转速下实现双马达单元的最大功率。优选地,双马达单元的最大功率可以在与运行转速范围的最大转速偏离超过10%或超过25%的转速下实现。这具有的优点是,对于特别大的运行转速范围得到双马达单元的在很大程度上恒定的最大功率。
[0038]
在另一个有利的实施形式中规定,所述双马达单元的最大功率根据总功率特性曲线在运行转速范围内与双马达单元在运行转速范围的最大转速时的功率最大偏差了35%、尤其是最大偏差了25%或15%。所述运行转速范围在此并且也可一般这样预先给定,使得总功率特性曲线的值在运行转速范围的最大转速和最小转速时是相同的。这恰好在与最后提到的实施形式的配合作用中是有利的。
[0039]
在另一个有利的实施形式中规定,所述双马达单元具有至少一个、即一个或多个另外的耦联到共同的旋转体上的电机,其中,所有电机具有彼此不同的功率特性曲线。在运行时,所有电机的转速因此始终线性地彼此相关,优选是相同的。在此,所述双马达单元构造成,在所述运行转速范围内通过所有电机的相互作用产生总运行功率,该总运行功率通过由所有相应的电机的不同功率特性曲线得出的总功率特性曲线来预先给定,其中,所述总功率特性曲线非线性地取决于所述共同的旋转体的转速。这在所述运行转速范围内在至少一个、即一个或多个运行点中、优选在所述运行转速范围的一个或多个范围上、理想地在整个运行转速范围上适用。在此,所述相互作用也可以定性地变化,例如所有电机的相互作用可以在所述运行转速范围的第一子范围内包括两个第一电机的相互作用,在该第一电机中至少一个另外的电机不贡献功率,并且在所述运行转速范围的与第一子范围不同的另一子范围中包括两个第一电机中的一个与至少一个另外的电机的相互作用,其中,所述两个第一电机中的另一个不贡献功率用于总运行功率。在与所述第一和第二子范围不同的第三子范围内,例如所有电机可以配合作用,并且在又与其它子范围不同的第四子范围内仅唯一一个电机产生所希望的总运行功率。这具有的优点是,可以更精确地预先给定总功率特
性曲线,例如可以选择更强或更弱的波度,以便使双马达单元与相应应用领域的特定要求相匹配。
[0040]
一方面也涉及一种具有根据所阐述的实施形式之一的双马达单元的飞轮质量存储器。优选地,所述飞轮质量存储器具有在按照规定的使用时设置在真空室中的旋转体。所述旋转体能够利用磁体支承装置来支承。
[0041]
另一方面涉及一种用于控制(如上所阐述的也可以理解为调节)飞轮质量存储器中的双马达单元的方法,其中,所述双马达单元具有机械地耦联到飞轮质量存储器的飞轮质量上的或包括飞轮质量的共同的旋转体,该旋转体具有至少两个机械地耦联到共同的旋转体上的电机,并且该电机分别具有彼此不同的功率特性曲线。所述控制包括在双马达单元的连续运行中对应于相应的单独的、即可单独预先给定的功率规定值这样运行电机,使得电机在相互作用中产生总运行功率,该总运行功率通过由电机的不同功率特性曲线得出的、非线性地取决于共同的旋转体的转速的总功率特性曲线预先给定。
[0042]
在此尤其是可以规定,所述电机在相互作用下这样运行,使得产生具有电机的最大效率的总运行功率。
[0043]
本方法的优点和有利的实施形式对应于所述双马达单元的优点和有利的实施形式,反之亦然。
[0044]
以上在说明书中、也在一般部分中提到的特征和特征组合以及以下在附图说明中提到的和/或在附图中单独示出的特征和特征组合不仅可以以分别给出的组合而且也可以以其它组合使用,而不离开本发明的范围。因此,本发明的在附图中未明确示出和阐述但通过来自所阐述的实施形式的单独的特征组合得到和可产生的实施形式也视为被包括和公开。因此,不具有原始制定的独立权利要求的所有特征的实施方案和特征组合也应视为被公开。此外,超出或偏离引用的权利要求中记载的特征组合的实施形式和特征组合尤其是通过以上实施方案应当被视为被公开。
附图说明
[0045]
在此,借助以下附图详细解释有利的实施形式。在附图中:
[0046]
图1示出用于飞轮储能器的双马达单元的一个示例性的实施形式;
[0047]
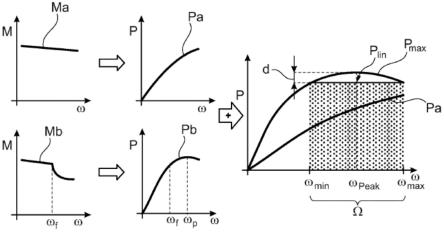
图2示出单个电机的示例性的第一力矩特征,包括得到的总功率特性曲线;以及
[0048]
图3示出单个电机的示例性的第二力矩特征,包括得到的总功率特性曲线。
具体实施方式
[0049]
在不同的附图中,相同的或功能相同的部件在此设有相同的附图标记。
[0050]
图1示出用于飞轮质量存储器的示例性的双马达单元的剖面图。在此,双马达单元1当前具有两个耦联到共同的旋转体2上的电机3a、3b。电机3a、3b在此分别具有定子4a、4b以及转子5a、5b,它们在运行中围绕共同的旋转轴线a旋转。在此,电机3a、3b在当前情况中通过其外置的转子5a、5b耦联到共同的旋转体2上,使得所述两个电机3a、3b的转速在双马达单元1运行时始终相同。
[0051]
如例如借助下面的附图阐述的,电机3a、3b在此分别具有彼此不同的功率特性曲线pa、pb。此外,双马达单元1构造为在运行转速范围ω内通过电机3a、3b的相互作用产生总
运行功率,该总运行功率通过由电机3a、3b的不同的功率特性曲线pa、pb得出的总功率特性曲线p
max
预先给定,并且总功率特性曲线p
max
不与共同的旋转体2的转速ω线性地相关。
[0052]
在图2中,现在在左边首先示出对于两个不同电机的两个示例性的力矩特征ma、mb与共同的旋转体的转速ω的关系。第一电机3a的转矩ma在此关于转速ω是恒定的,这导致随着转速ω线性上升的功率p并且因此导致线性的功率特性曲线pa。第二电机3b在此在当前情况中通过力矩特征mb来表征,所述力矩特征低于极限转速ωf同样是恒定的,然而此外由于场削弱随着转速ω的上升强烈地、例如指数地下降。由此产生的功率特性曲线pb同样在图2中示出。因此,第二电机3b的功率p也随着功率特性曲线pb而线性地增大直至极限频率ωf,并且高于极限频率ωf保持恒定。
[0053]
因此,在所述两个电机3a、3b的相互作用中得到在图2右侧示出的总功率特性曲线p
max
。通过总功率特性曲线p
max
,对于从与极限转速ωf相同的最小转速ω
min
到最大转速ω
max
的运行转速范围ω,达到线性的运行功率p
lin
。在此,在相同的图表中为了比较而绘制出第一电机3a的功率特性曲线pa,以便示出该第一电机仅不能产生期望的运行功率p
lin
。更强的第一电机3a的替代方案为了直观通过功率特性曲线p
alt
绘出,该第一电机具有线性的功率特性曲线并且在转速ω
min
时已经施加期望的功率p
lin
。在此明显的是,在运行转速范围ω的较高的转速ω的情况下,例如在ω
max
的情况下,在这种替代的第一电机中的电流对于线性功率变化曲线而言必须非常强烈地降低,这随之带来大的损耗。通过所述两个电机3a、3b的组合和由此实现的总功率特性曲线p
max
显著地降低了所述效应,在本示例中近似减半。
[0054]
所述两个电机3a、3b的一个替代的设计方案示例性地在图3中示出。再次在那里示出第一或第二电机3a、3b的两个转矩特征ma、mb关于转速ω连同由此得到的功率特性曲线pa、pb。在此示出的示例中,至少一个、在此甚至两个力矩特征ma、mb单调下降地延伸。在此,第一力矩特征曲线ma随转速ω线性下降,这导致功率特性曲线pa,其虽然随转速增加单调上升,但随转速ω增加而下降,也就是说不太剧烈地上升,如这例如通过对数函数所描述的那样。第二电机3b的力矩特征mb直至极限频率ωf同样线性地下降,然而此后类似于在图2中示出的示例由于场削弱而强烈地下降,使得所产生的功率特性曲线pb仅单调地上升至特定的频率ω
p
,然而高于转速ω
p
单调地下降。在此,转速ω
p
大于转速ωf。
[0055]
所述两个电机的相互作用现在得到在图3右侧示出的总功率特性曲线p
max
。在此,为了说明也标绘出第一机器3a的各个功率特性曲线pa。由此得出所期望的线性运行功率p
lin
仅通过第一电机3a不能有效地实现。在此,总功率特性曲线p
max
在转速ω
peak
的情况下达到其最大值。在此,所述转速ω
peak
当前大于如下转速ω
p
,在该转速的情况下第二电机3b的功率特性曲线pb达到其最大值。总体上,通过所述两个电机3a、3b与相应的力矩特征曲线ma、mb或功率特性曲线pa、pb的共同作用,因此实现了总功率特性曲线p
max
,其在运行转速范围ω内非常平缓地延伸并且因此可以有效地用于在整个运行转速范围ω内的线性运行功率。在此,对于运行速度范围ω、ω
min
和ω
max
的极限而言,总功率特性曲线p
max
的值对应于对于运行速度范围ω所期望的运行功率p
lin
的值。由此实现,总功率特性曲线p
max
在转速ω
peak
下的最大值的偏差仅最小地偏离所期望的运行功率p
lin
。相应的偏差d例如可以小于25%或甚至小于15%。在图3所示的示例中,所述偏差大约是所需的运行功率p
lin
的10%。由此,其它部件也可以最佳地与待产生的运行功率p
lin
相匹配,从而也优化了冷却功率、电损耗等,从而总体上优化了双马达单元1的效率并且由此优化了所属的飞轮质量存储器的效率。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1